Stepper Motor
Stepper Motor
ST-42BYH1004


|
|
|
|
| STEP ANGLE |
0.9° 5% |
VOLTAGE |
5V |
| PHASES |
2 |
CURRENT/PHASE |
1.0A |
| INSULATION RESISTANCE |
100M ohm (500V DC) |
INDUCTANCE/PHASE |
11.5 Mh 20% |
| CLASS OF INSULATION |
B |
RESISTANCE/PHASE |
5.0 ohm 10% |
| WEIGHT |
0.34Kg Max |
HOLDING TORQUE |
4.4Kgf.cm |
42SHD4002-24B


|
|
|
|
| STEP ANGLE |
1.8° |
VOLTAGE |
12V |
| PHASES |
2 |
CURRENT/PHASE |
0.55A |
| INSULATION RESISTANCE |
100M ohm (500V DC) |
INDUCTANCE/PHASE |
28 mh 20% |
| CLASS OF INSULATION |
B |
RESISTANCE/PHASE |
22 ohm 10% |
| WEIGHT |
0.2Kg |
HOLDING TORQUE |
300mN.m |
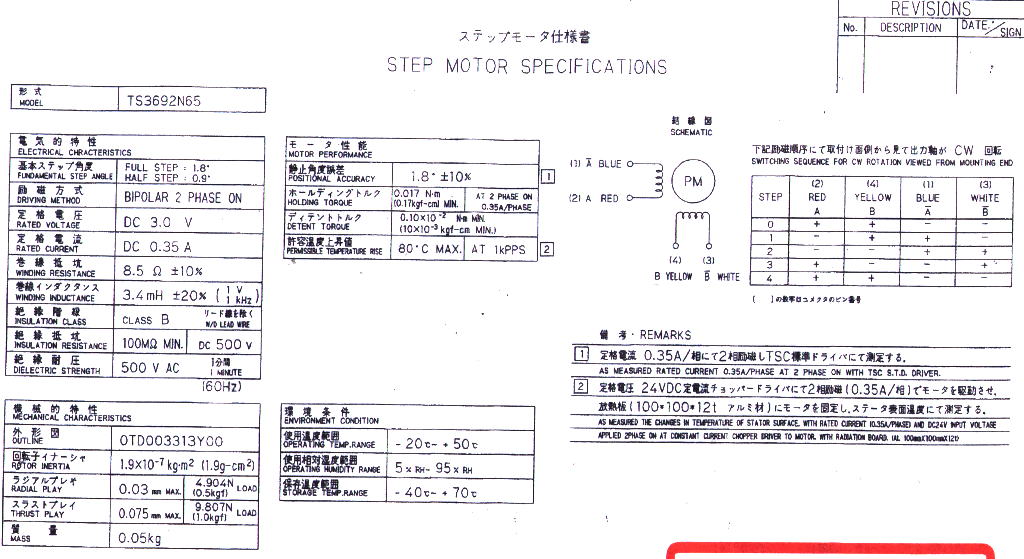
TS3692N65


|
|
|
|
| STEP ANGLE |
1.8° |
VOLTAGE |
3V |
| PHASES |
2 |
CURRENT/PHASE |
0.35A |
| INSULATION RESISTANCE |
100M ohm (500V DC) |
INDUCTANCE/PHASE |
3.4 mh 20% |
| CLASS OF INSULATION |
B |
RESISTANCE/PHASE |
8.5 ohm |
| WEIGHT |
0.05 Kg |
HOLDING TORQUE |
0.071N.m |
PM25S-024


|
|
|
|
| STEP ANGLE |
15° |
VOLTAGE |
24V(Test:DC5V,100mA) |
| PHASES |
2 |
CURRENT/PHASE |
?A |
| INSULATION RESISTANCE |
100M ohm (500V DC) |
INDUCTANCE/PHASE |
? mh 20% |
| CLASS OF INSULATION |
E |
RESISTANCE/PHASE |
70 ohm |
| WEIGHT |
? Kg |
HOLDING TORQUE |
9 mN.m |
Moter Driver
DRV8835 stepper motor driver module

TMC2208 SILENTSTEPSTICK

Test1
- Stepper Moter: ST-42BYH1004
- Moter Driver: DRV8835
|
|
|
|
| Power_5V |
VM |
VCC |
Arduino_5V |
| Moter_Black |
AOUT1 |
MODE |
None(or Arduino_5VGND) |
| Moter_Green |
AOUT2 |
AIN1 |
Arduino_Pin8 |
| Moter_Red |
BOUT1 |
AIN2 |
Arduino_Pin9 |
| Moter_Blue |
BOUT2 |
BIN1 |
Arduino_Pin10 |
| Power_GND&Arduino_GND |
GND |
BIN2 |
Arduino_Pin11 |

1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26 | #include <Stepper.h>
const int stepsPerRevolution = 400; // change this to fit the number of steps per revolution
// for your motor
// initialize the stepper library on pins 8 through 11:
Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11);
void setup() {
// set the speed at 60 rpm:
myStepper.setSpeed(60);
// initialize the serial port:
Serial.begin(9600);
}
void loop() {
// step one revolution in one direction:
Serial.println("clockwise");
myStepper.step(stepsPerRevolution);
delay(500);
// step one revolution in the other direction:
Serial.println("counterclockwise");
myStepper.step(-stepsPerRevolution);
delay(500);
}
|
Test2
- Stepper Moter: 42SHD4002-24B
- Moter Driver: DRV8835
|
|
|
|
| Power_7V |
VM |
VCC |
Arduino_5V |
| Moter_Black |
AOUT1 |
MODE |
None(or Arduino_5VGND) |
| Moter_Green |
AOUT2 |
AIN1 |
Arduino_Pin8 |
| Moter_Red |
BOUT1 |
AIN2 |
Arduino_Pin9 |
| Moter_Blue |
BOUT2 |
BIN1 |
Arduino_Pin10 |
| Power_GND&Arduino_GND |
GND |
BIN2 |
Arduino_Pin11 |
| const int stepsPerRevolution = 200;
|
Test3
- Stepper Moter: TS3692N65
- Moter Driver: DRV8835
|
|
|
|
| Power_3V |
VM |
VCC |
Arduino_5V |
| Moter_Blue |
AOUT1 |
MODE |
None(or Arduino_5VGND) |
| Moter_Red |
AOUT2 |
AIN1 |
Arduino_Pin8 |
| Moter_Yellow |
BOUT1 |
AIN2 |
Arduino_Pin9 |
| Moter_White |
BOUT2 |
BIN1 |
Arduino_Pin10 |
| Power_GND&Arduino_GND |
GND |
BIN2 |
Arduino_Pin11 |
| const int stepsPerRevolution = 200;
|
Test4
- Stepper Moter: PM25S-024
- Moter Driver: DRV8835
|
|
|
|
| Power_5V |
VM |
VCC |
Arduino_5V |
| Moter_Red |
AOUT1 |
MODE |
None(or Arduino_5VGND) |
| Moter_Black |
AOUT2 |
AIN1 |
Arduino_Pin8 |
| Moter_Blue |
BOUT1 |
AIN2 |
Arduino_Pin9 |
| Moter_Yellow |
BOUT2 |
BIN1 |
Arduino_Pin10 |
| Power_GND&Arduino_GND |
GND |
BIN2 |
Arduino_Pin11 |
| const int stepsPerRevolution = 24;
|
Test5
- Stepper Moter: JK42HS34(Amazon)
- Moter Driver: DRV8835
|
|
|
|
| Power_8.5V |
VM |
VCC |
Arduino_5V |
| Moter_Black |
AOUT1 |
MODE |
None(or Arduino_5VGND) |
| Moter_Green |
AOUT2 |
AIN1 |
Arduino_Pin8 |
| Moter_Blue |
BOUT1 |
AIN2 |
Arduino_Pin9 |
| Moter_Red |
BOUT2 |
BIN1 |
Arduino_Pin10 |
| Power_GND&Arduino_GND |
GND |
BIN2 |
Arduino_Pin11 |
| const int stepsPerRevolution = 200;
|
Last update: April 23, 2021
{kind=link}