9. Mechanical design & Machine Design¶
The team¶
Ambroise De Vries Quentin Benethuillere Selena Pere
Machine choice and scope¶
At first we thought about making a machine that could cover several functionalities :
- a pick and place machine to help grabbing and positioning tiny electronics components on PCBs.
- a drawing machine.
- a plotter for light painting.
All those functions basically require mainly 2-axis motion, and eventually a relatively short motion on the vertical axis as well. We were thinking that we could relatively simply replace the tool used depending on the application desired.
Starting from those ideas, we progressively focused on the drawing machine only. However, we are convinced that our machine as it is now would allow us to also make light painting. We would just need to make a box to create a dark environment surrounding the machine but unfortunately we had no time to work on it yet.
Hero shots¶
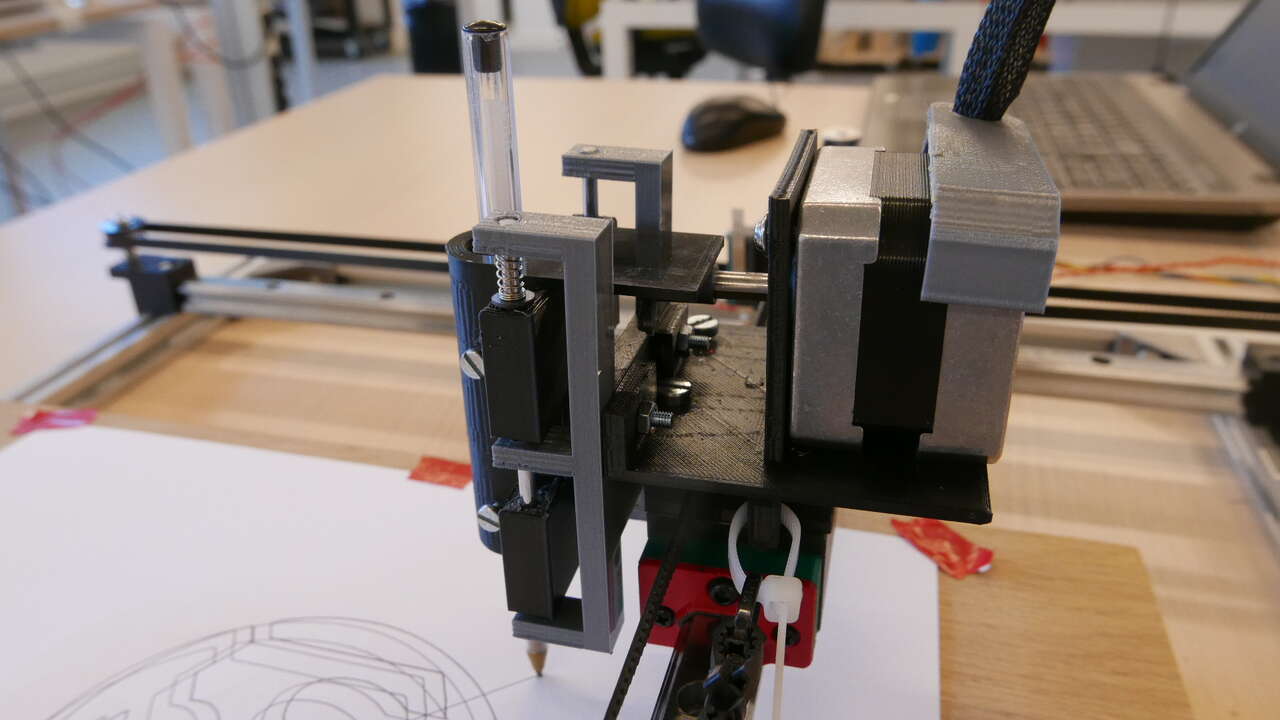
Before going any further, here is our drawing machine and one of its first drawings.
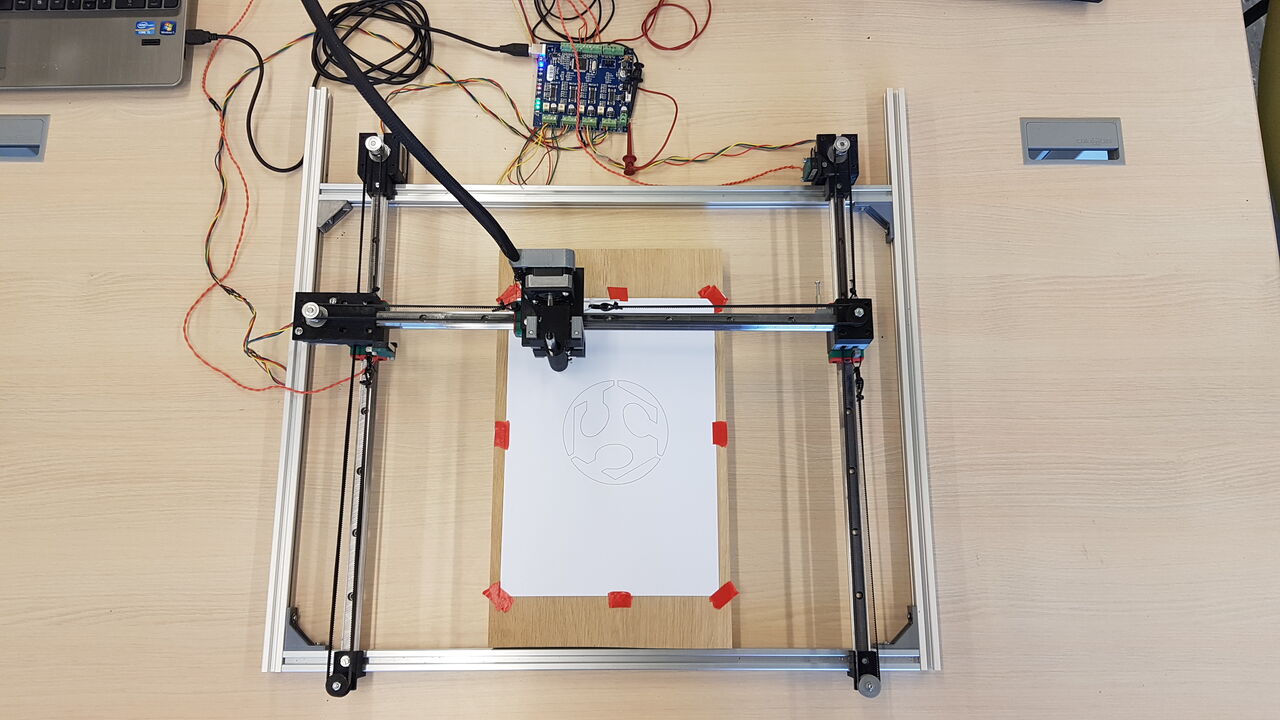
Drawing machine - top view
SW used¶
- 3D modelling: Fusion360 (Selena, Quentin) and SketchUp (Ambroise)
- Slicer for 3D printing: Cura
- Motor control: Chilippepr
- 2D drawing: Inkscape
- Gcode generation: Jscut
Bill Of Material (BOM)¶
| Part | Quantity | Notes |
| Stepper motors Nema 17 | 4 | X axis : 1 motor Y axis : 2 motors Z axis : 1 motor |
| Sliding rails | 3 | 500x15x15mm |
| Bearing pillow blocks | 3 | 60mm x 47mm |
| Aluminium extrusions | 4 | 610x20x20mm |
| Timing belts | 3 | |
| Toothed pulleys | 3 | 20 teeth |
| Ball bearing | 3 | 1 for each return pulley |
| End switches | 2 | 1 for Xmin and 1 for Ymin |
| TinyG CNC v8 | 1 | |
| M3/M4 screws and nuts | different length needed | |
| Washers | ||
| Zip ties | to tighten the timing belts |
Phase 1 : Mechanical Design¶
Basically, herebelow is presented the main material we started with :
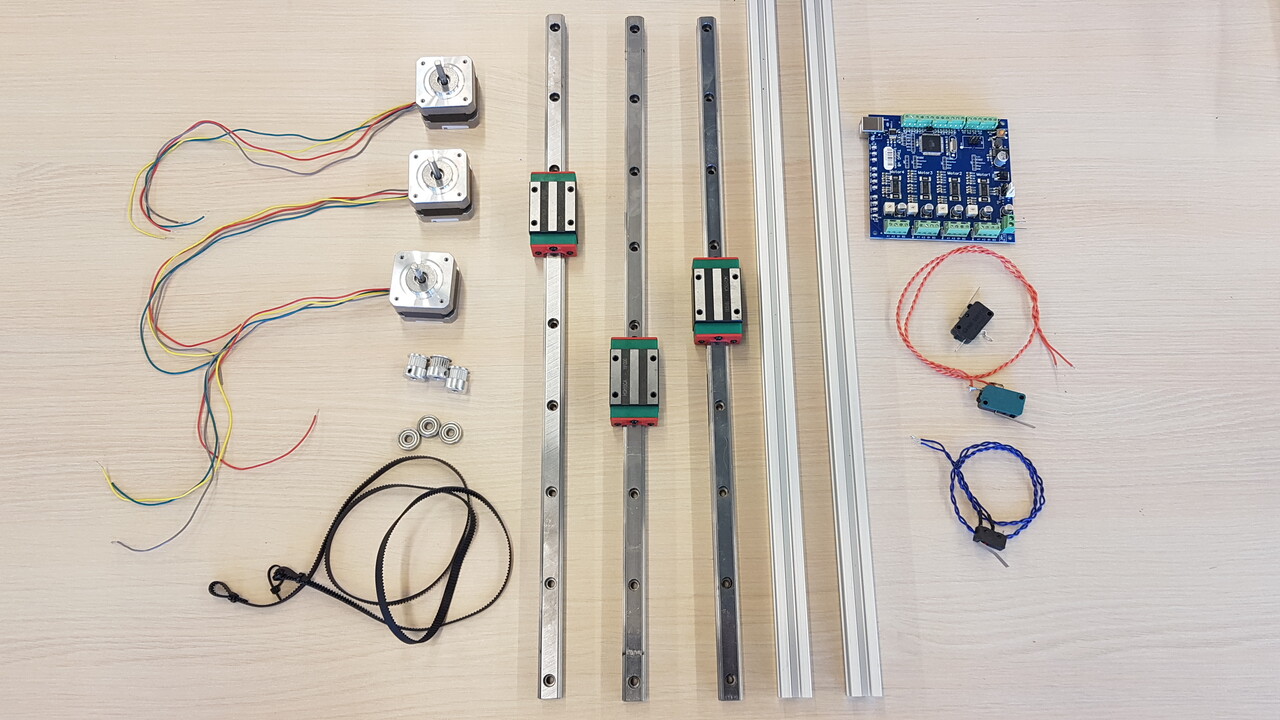
Initial materials for machine building
Amont the main parts, one can observe the sliding rails and corresponding pillow blocks, extrusions for the main frame, motors (Nema 17), timing belts, pulleys, end-switches and tinyG controller. Of course various sorts of screws and bolts (mainly M3 and M4) have also been used.
Note: On the picture above, one can observe 3 motors, but as we managed quite rapidly to obtain motion on 2 dimensions, we decided to add a fourth motor to control the vertical motion of the pen.
The whole challenge was thus to assemble all those parts together to obtain a machine capable of performing precise and relatively quick movements at first in 2 dimensions (that I will call x and y in the rest of this presentation). In order to do so, we all have designed some parts that we later on 3D printed.
Drawing machine complete 3D model (Selena)¶
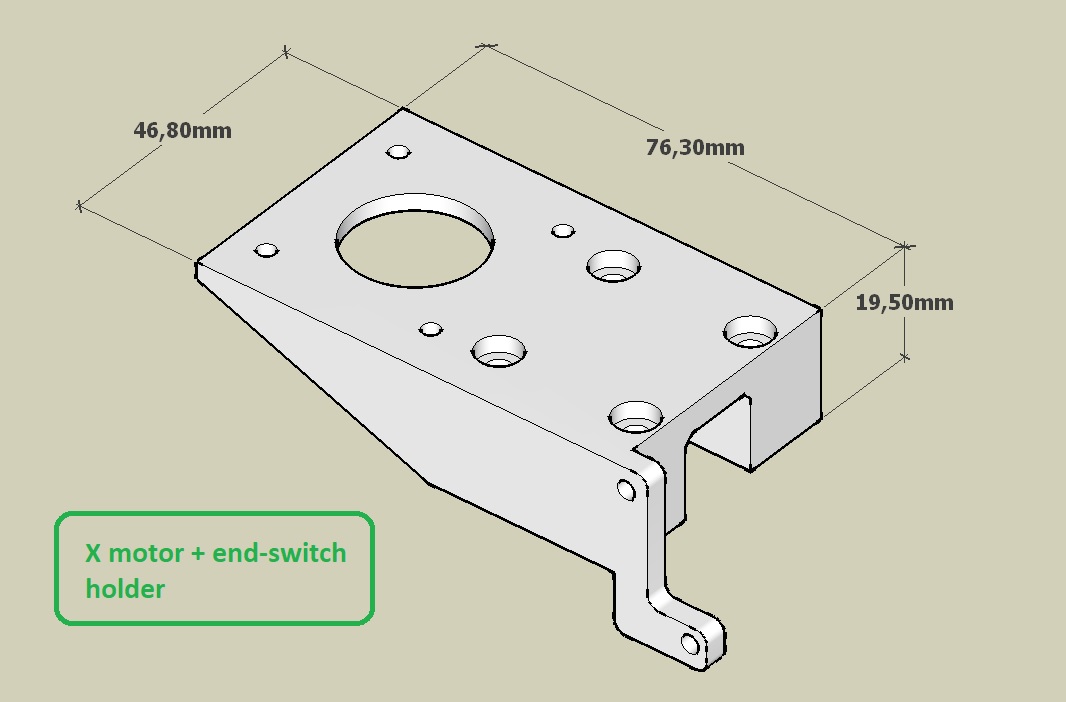
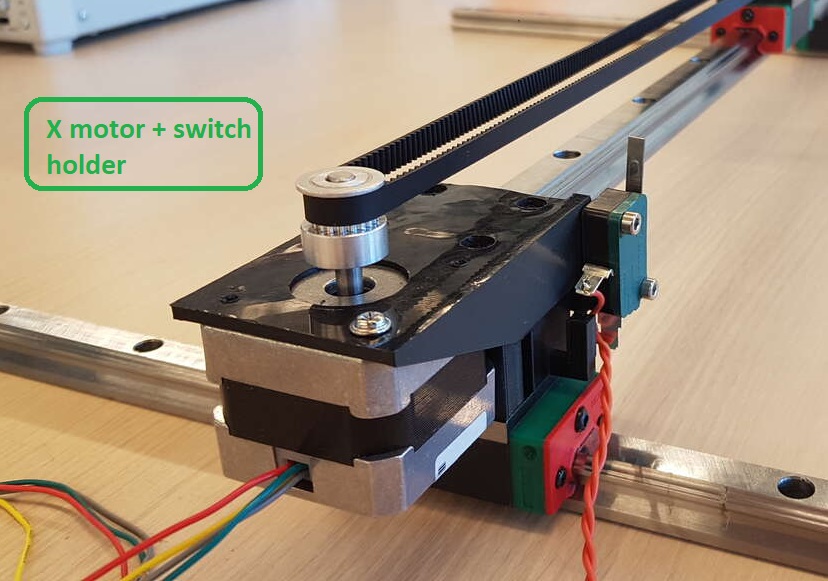
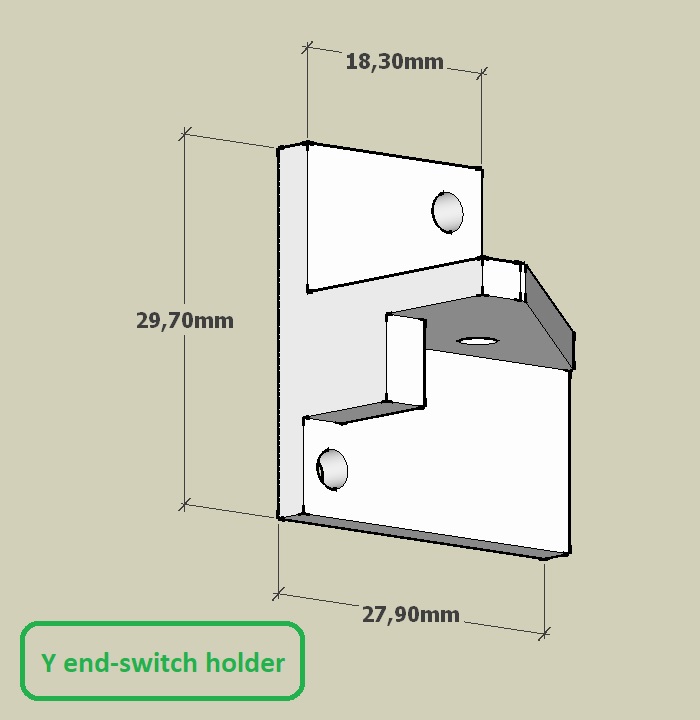
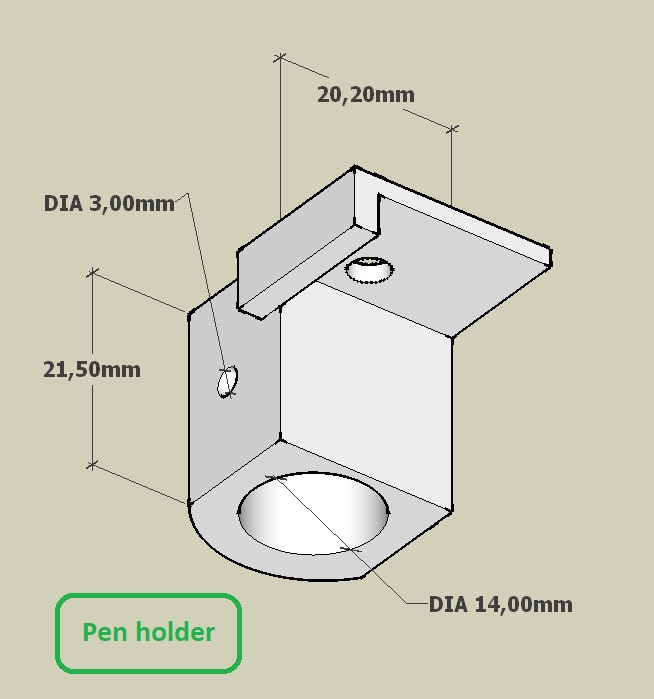
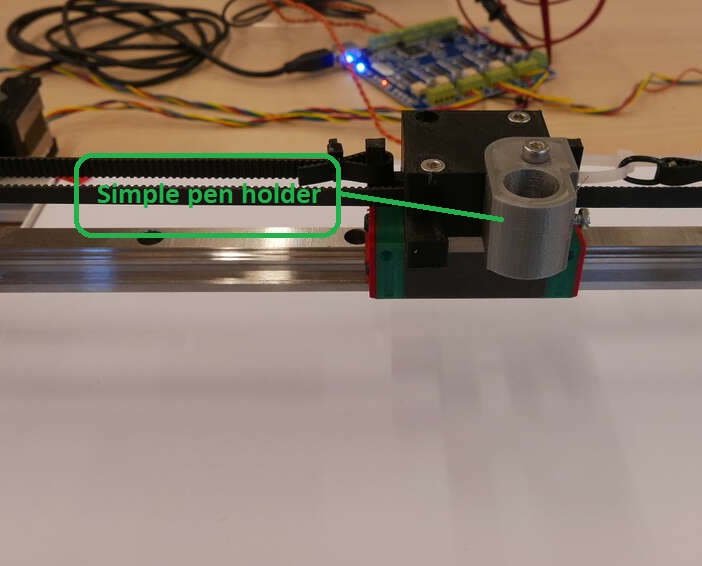
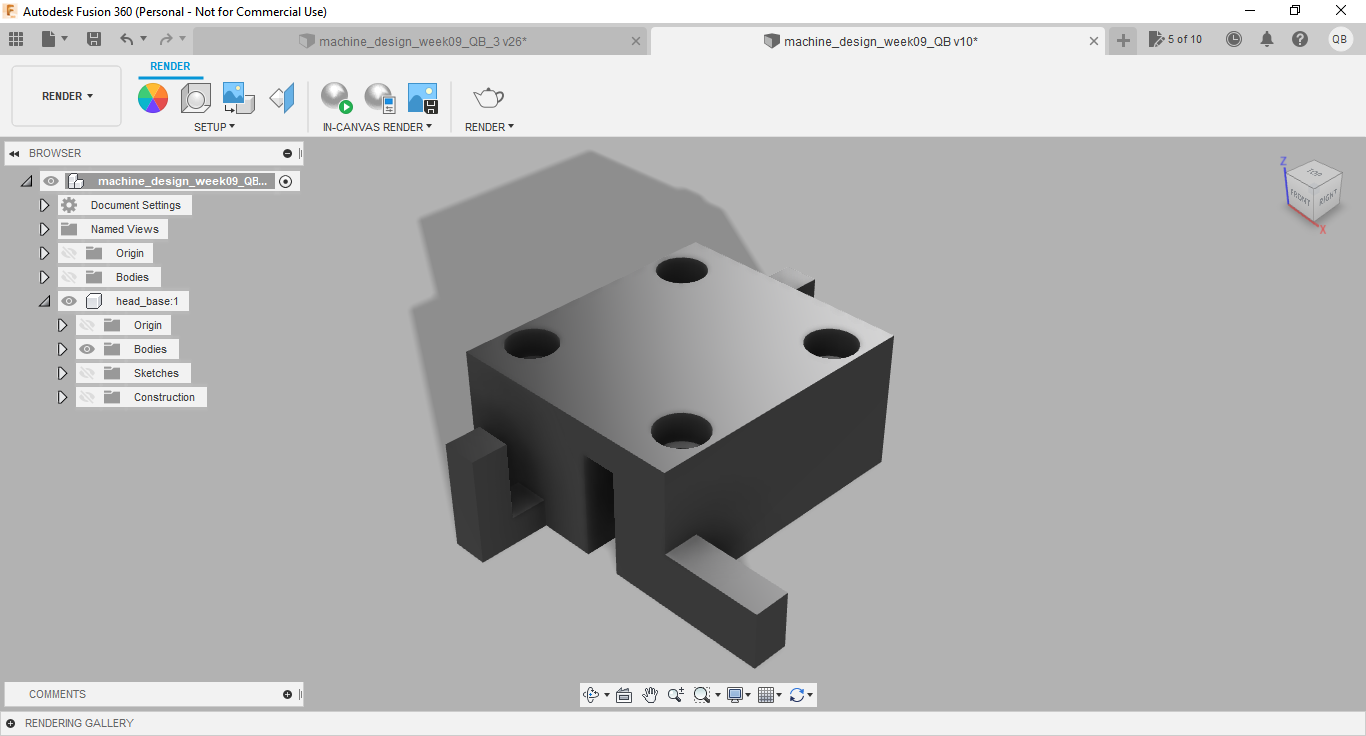
Axes joints, X motor holder, X pulley holder, Y end-switch holder, Simple pen holder (Ambroise)¶
X motor holder
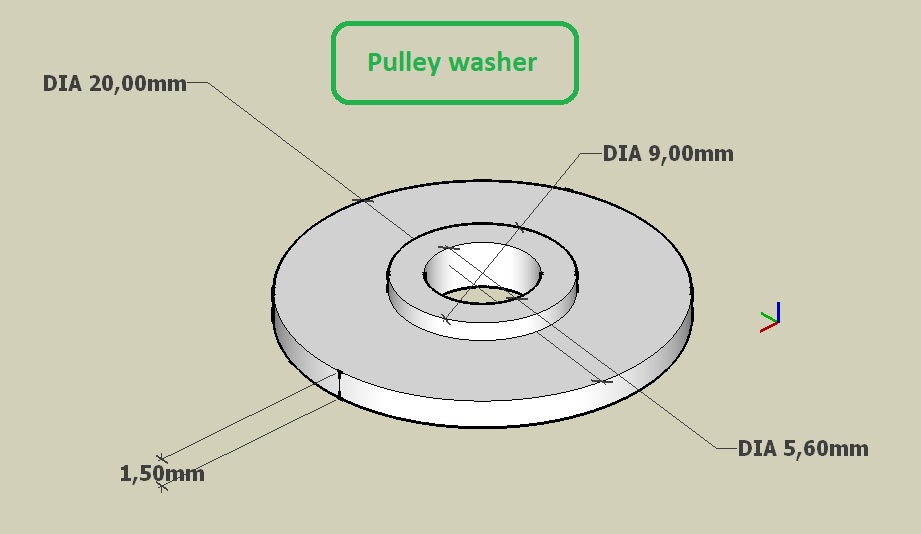
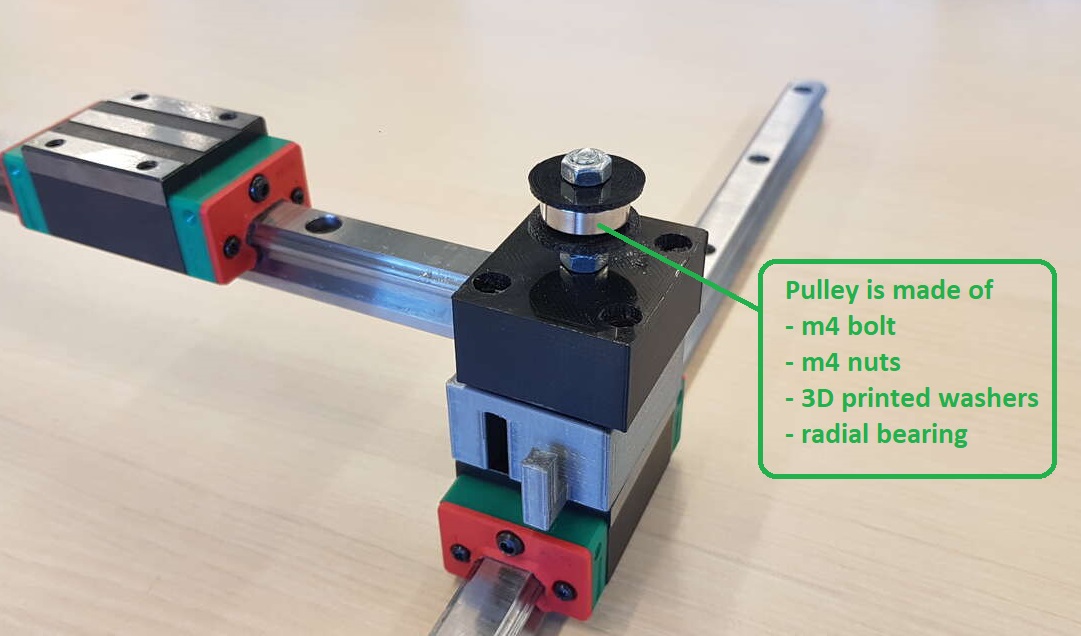
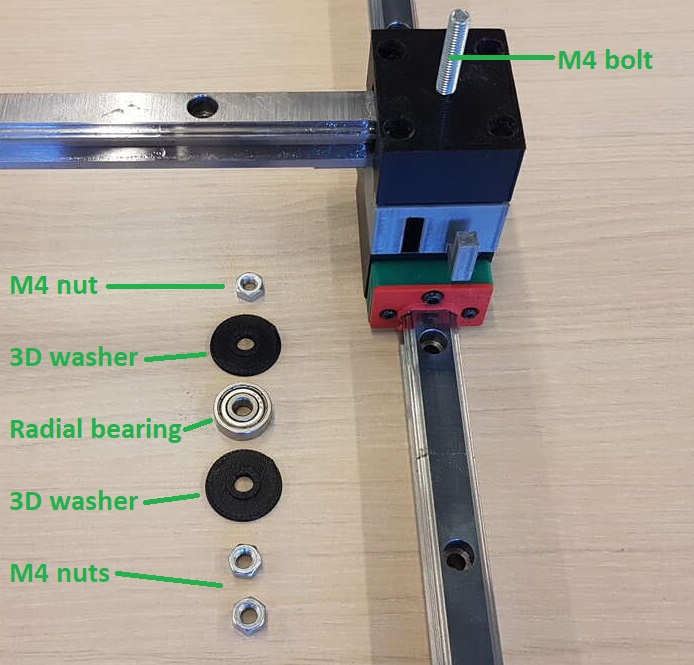
Pulley washer
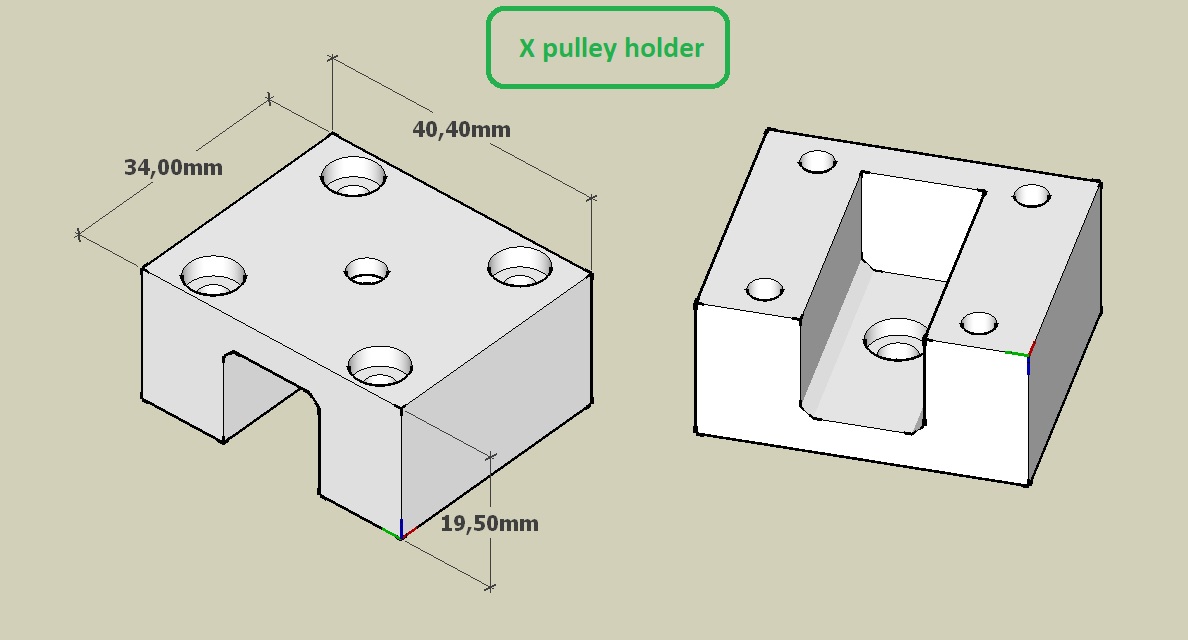
X pulley holder
Y switch holder
SSimple pen holder
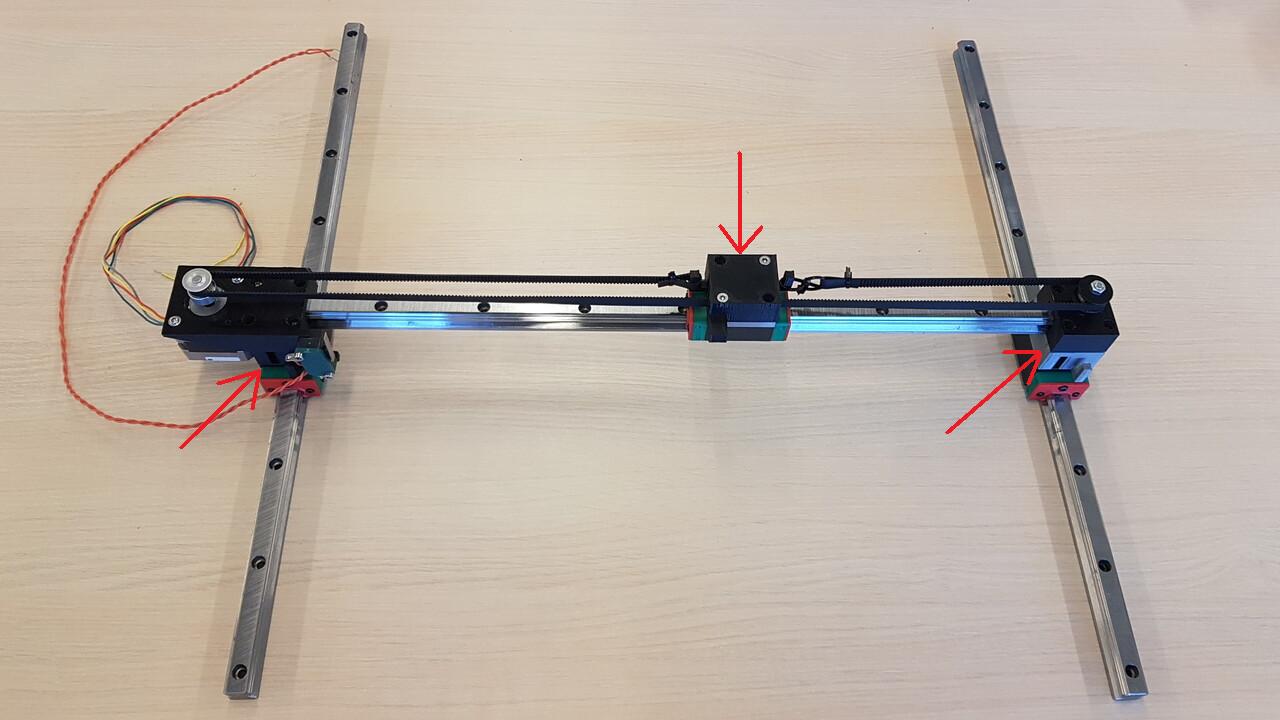
Timing belts fasteners, moving pen holder (Quentin)¶
Timing belts fasteners, with extrusion for end-switch activation.
 |
 |
| Fusion360 timing belt fastener model - top side view | Fusion360 timing belt fastener model - bottom side view |
 |
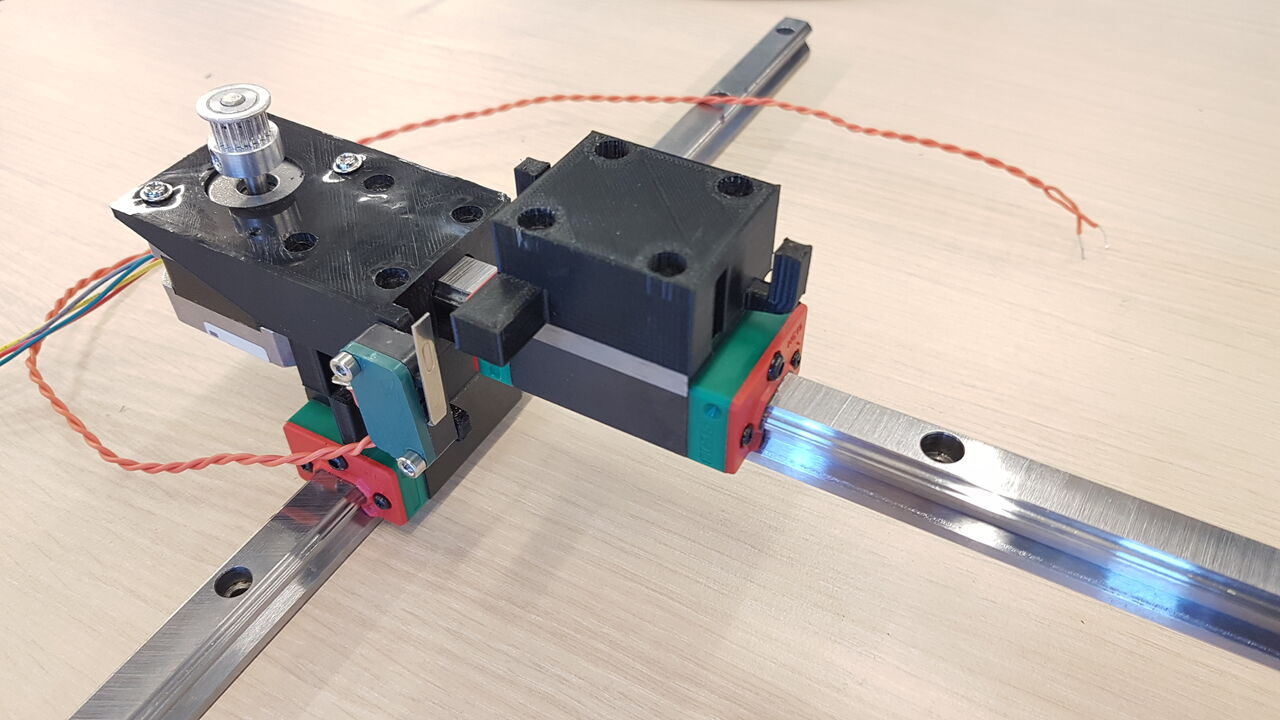 |
| Parts positions in the machine | Presentation of the end-switch activation function |
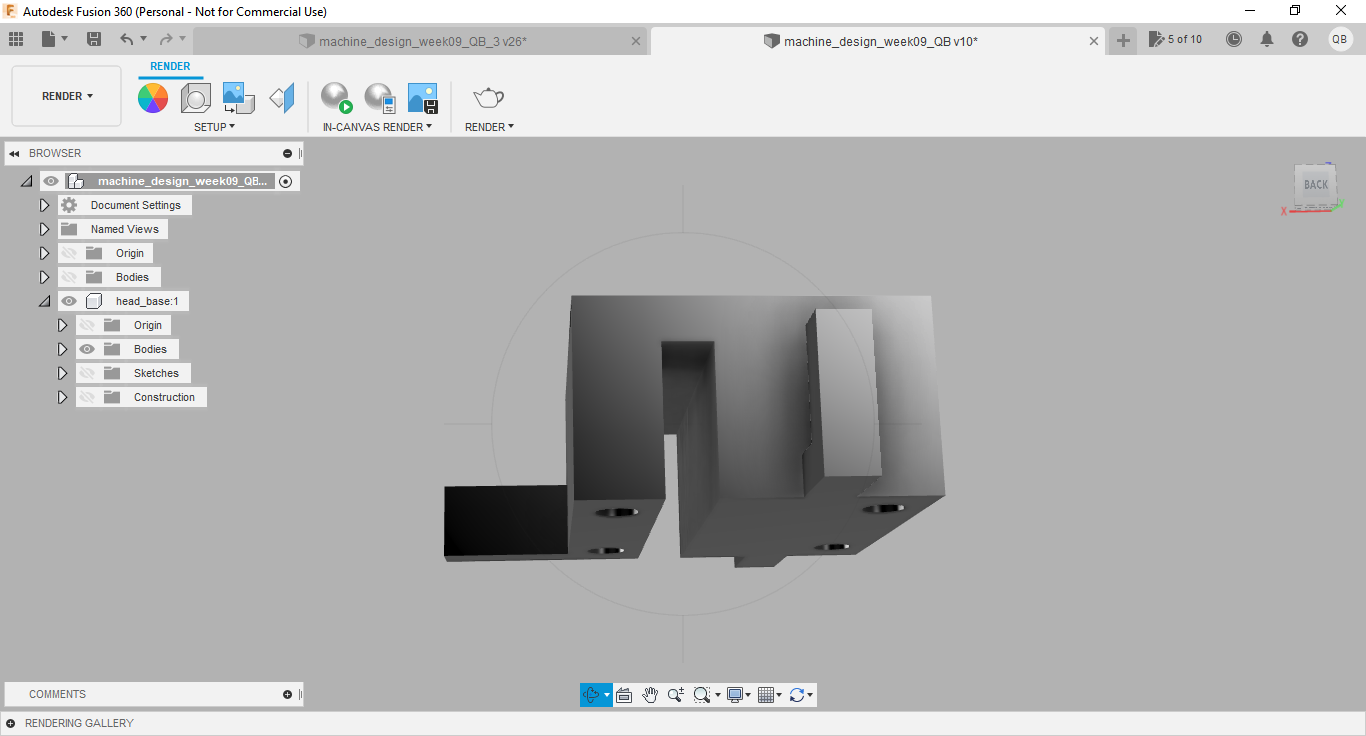
Pen holder that allows short displacement on the vertical axis to lift the pen away from the material for going from one point to another while drawing.
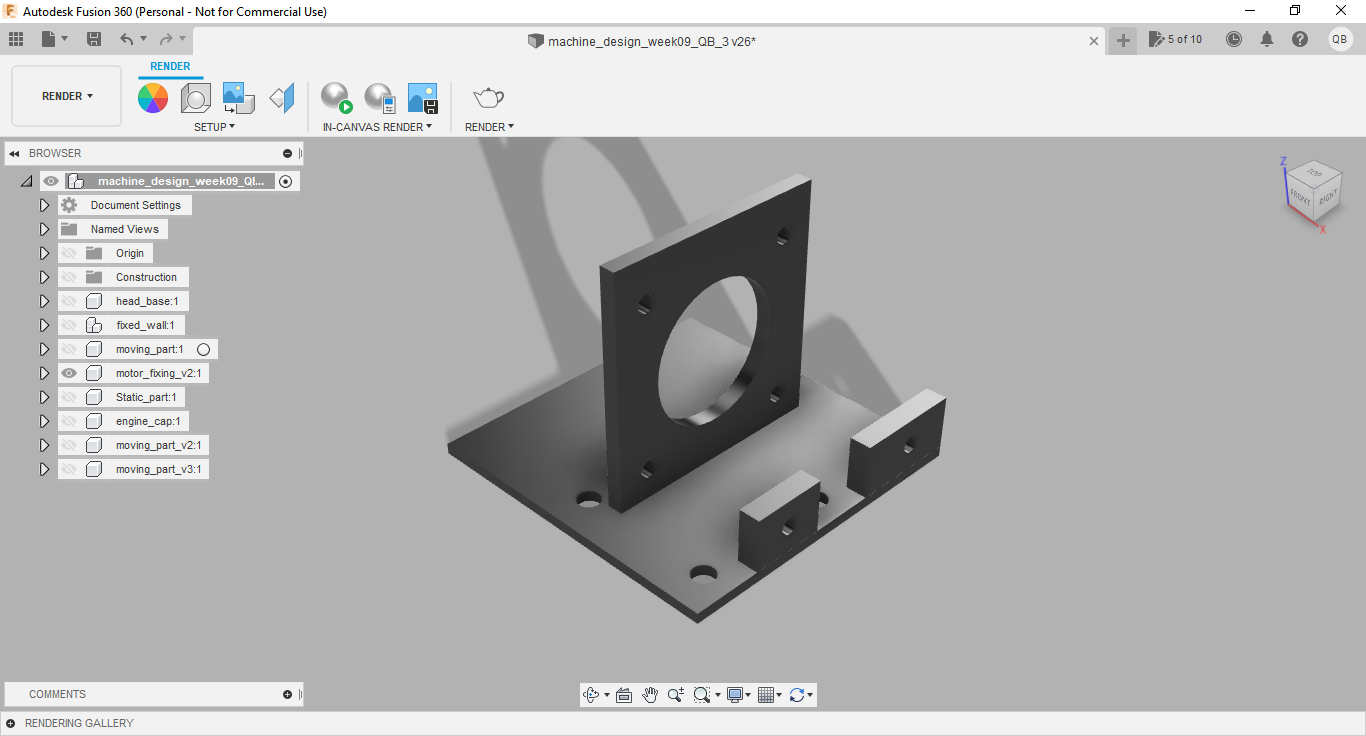
In order to design a pen holder that could slide in the vertical axis and that could be easyly 3D printed, I have chosen to perform a design in 3 separate parts + a motor shaft cap. They are all presented below :
 |
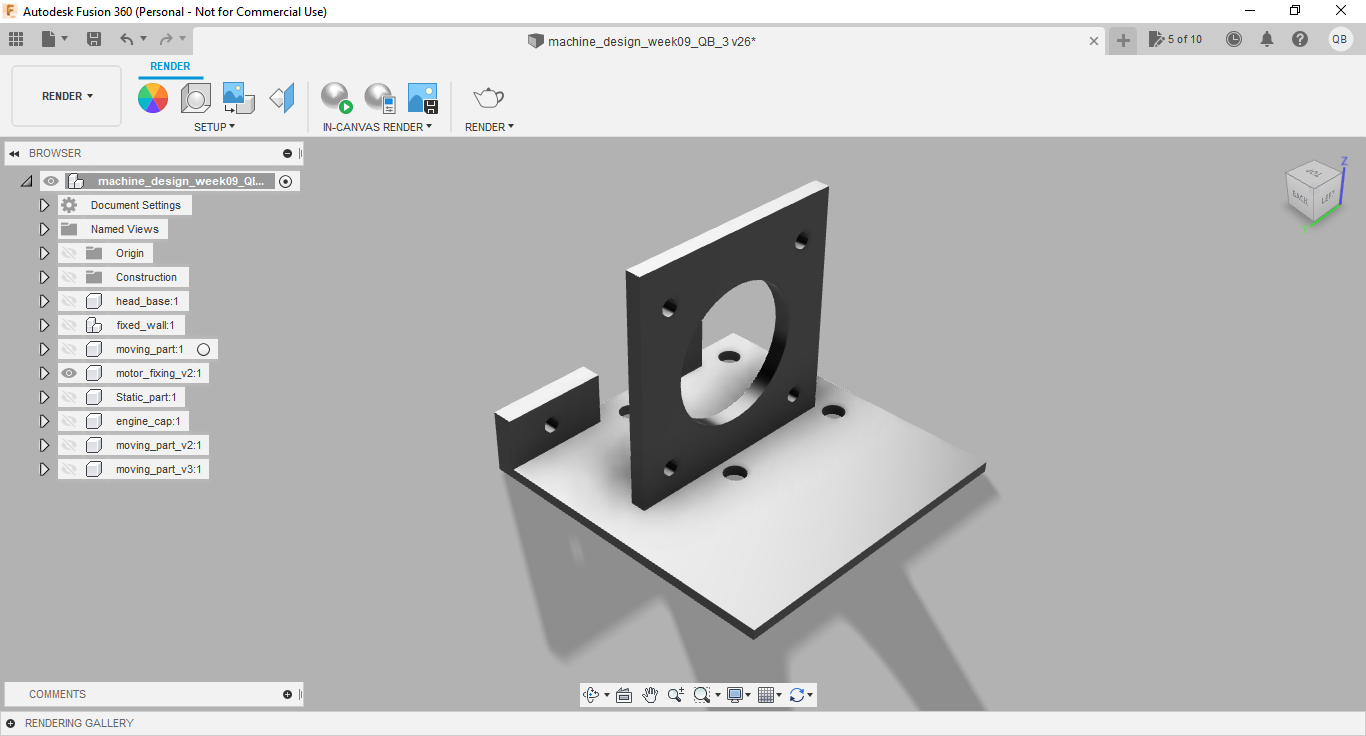 |
| Fusion360 motor support model - front view | Fusion360 motor support model - back view |
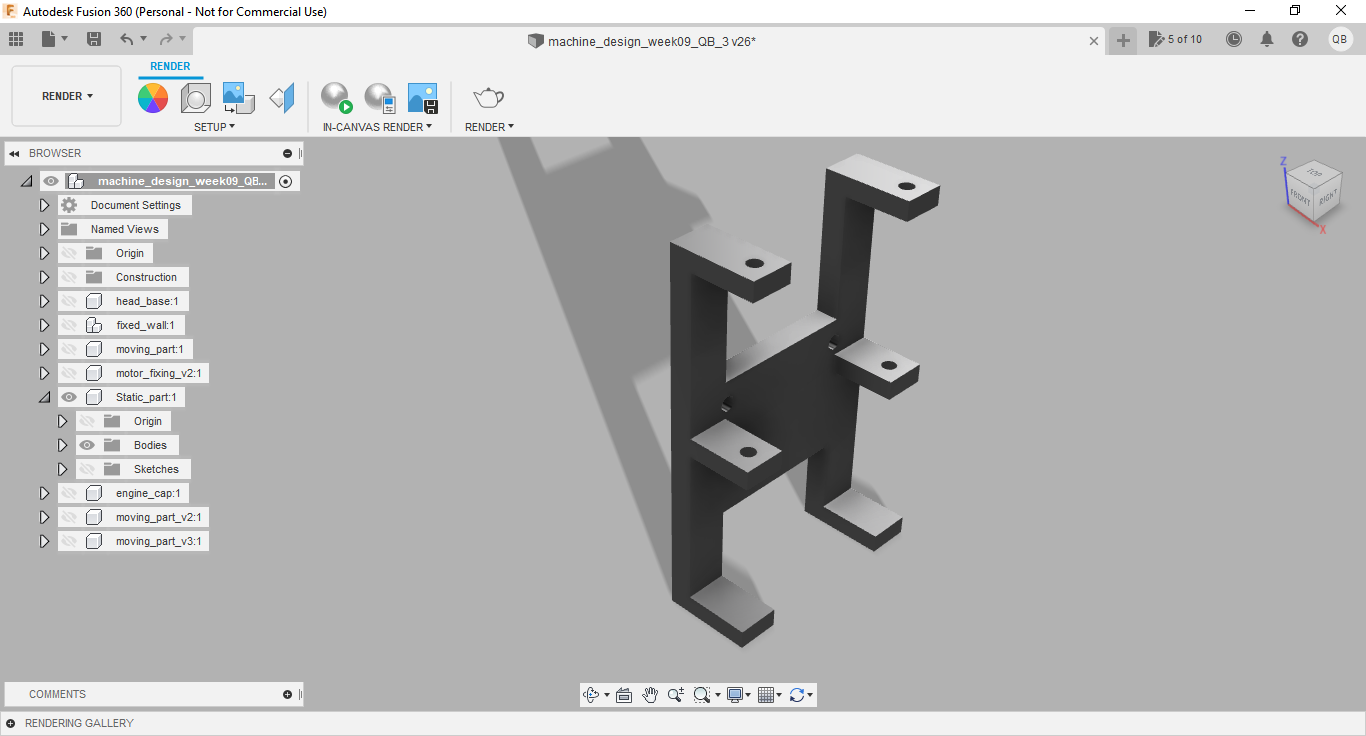 |
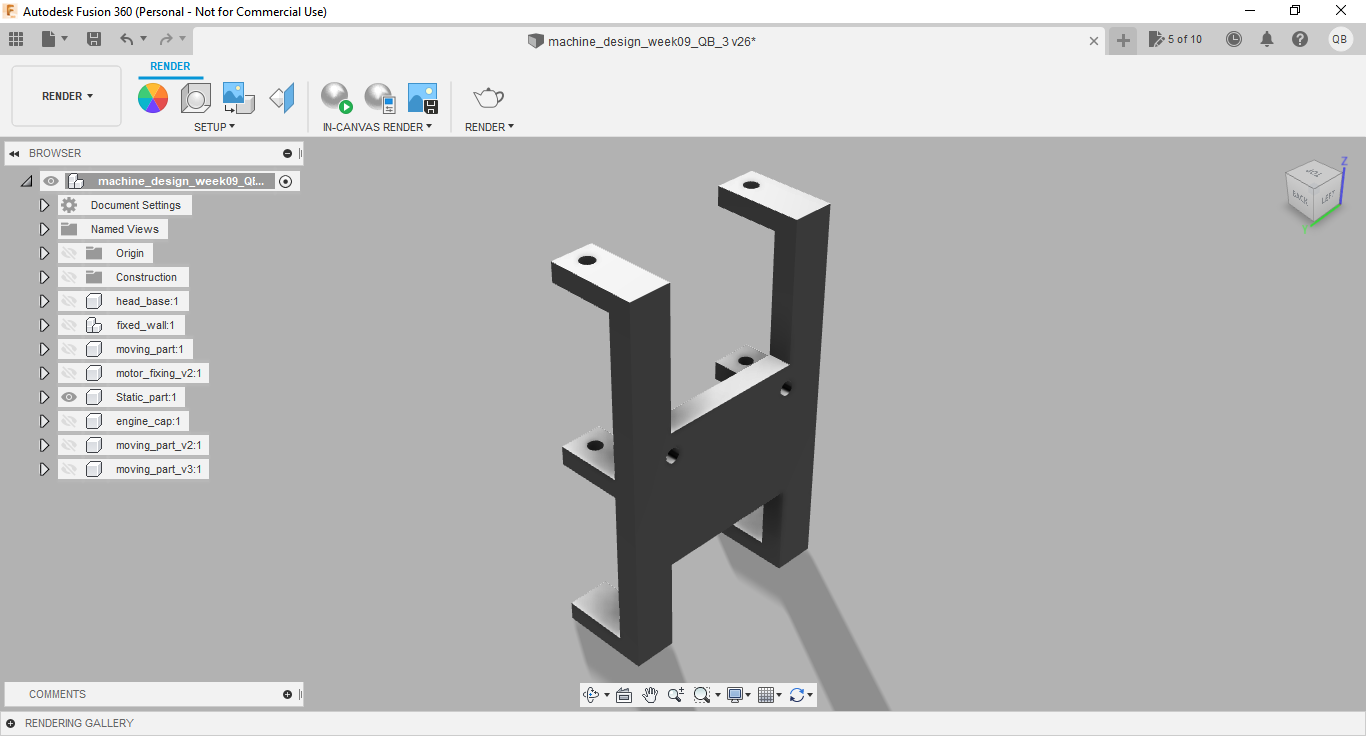 |
| Fusion360 static part for vertical motion model - front view | Fusion360 static part for vertical motion model - back view |
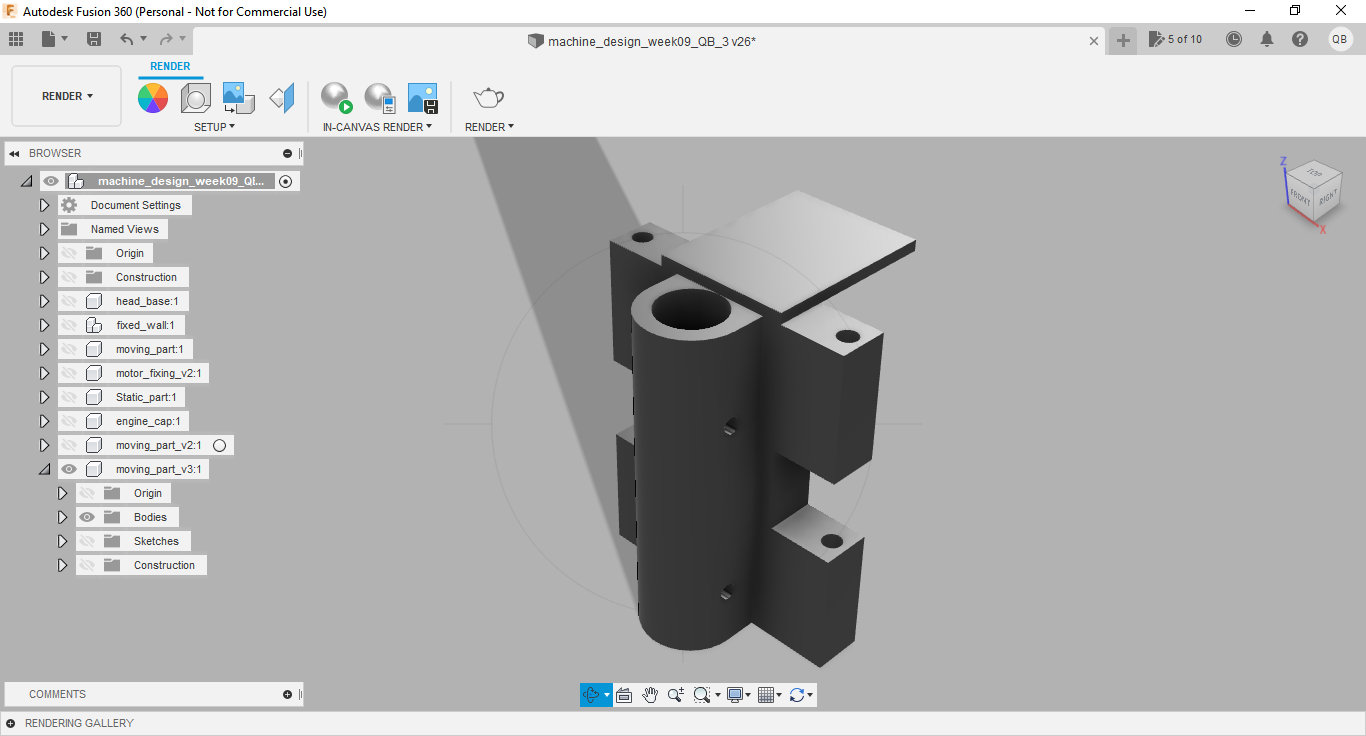 |
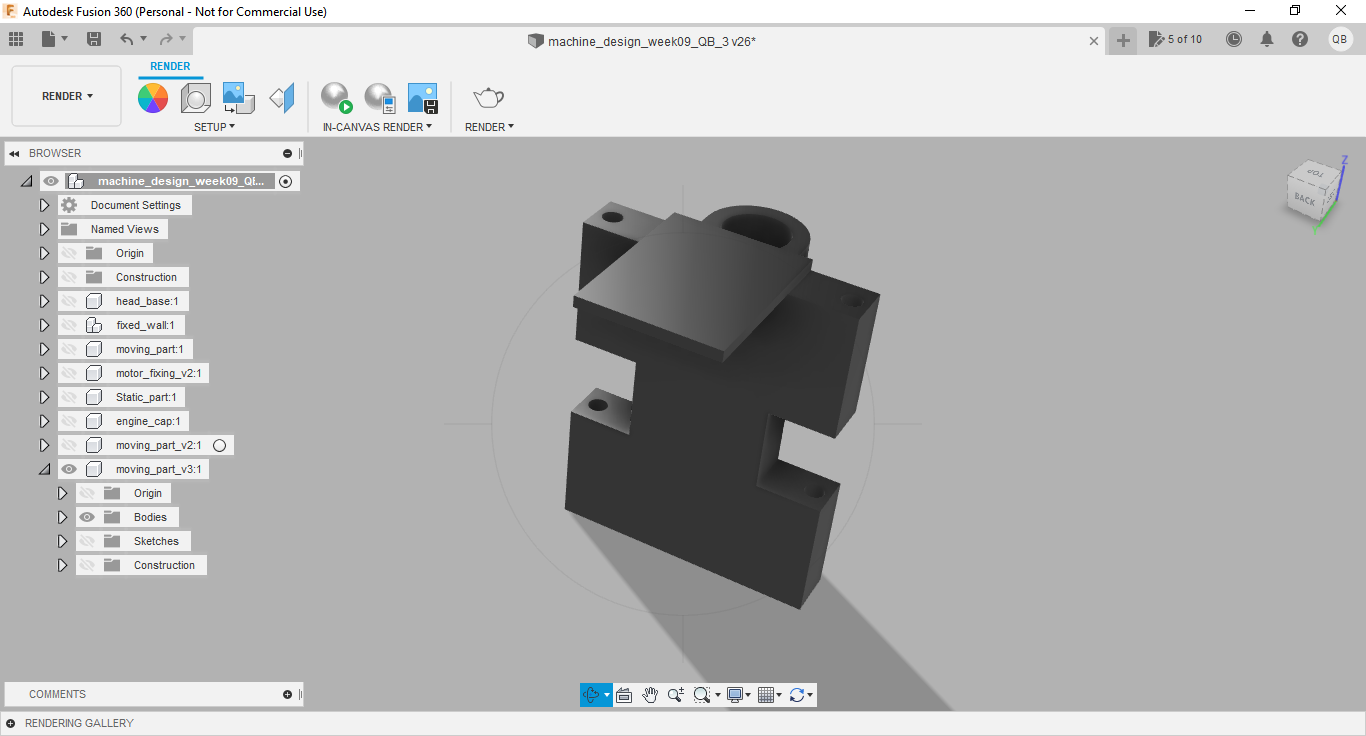 |
| Fusion360 moving pen holder part - front view | Fusion360 moving pen holder part - back view |
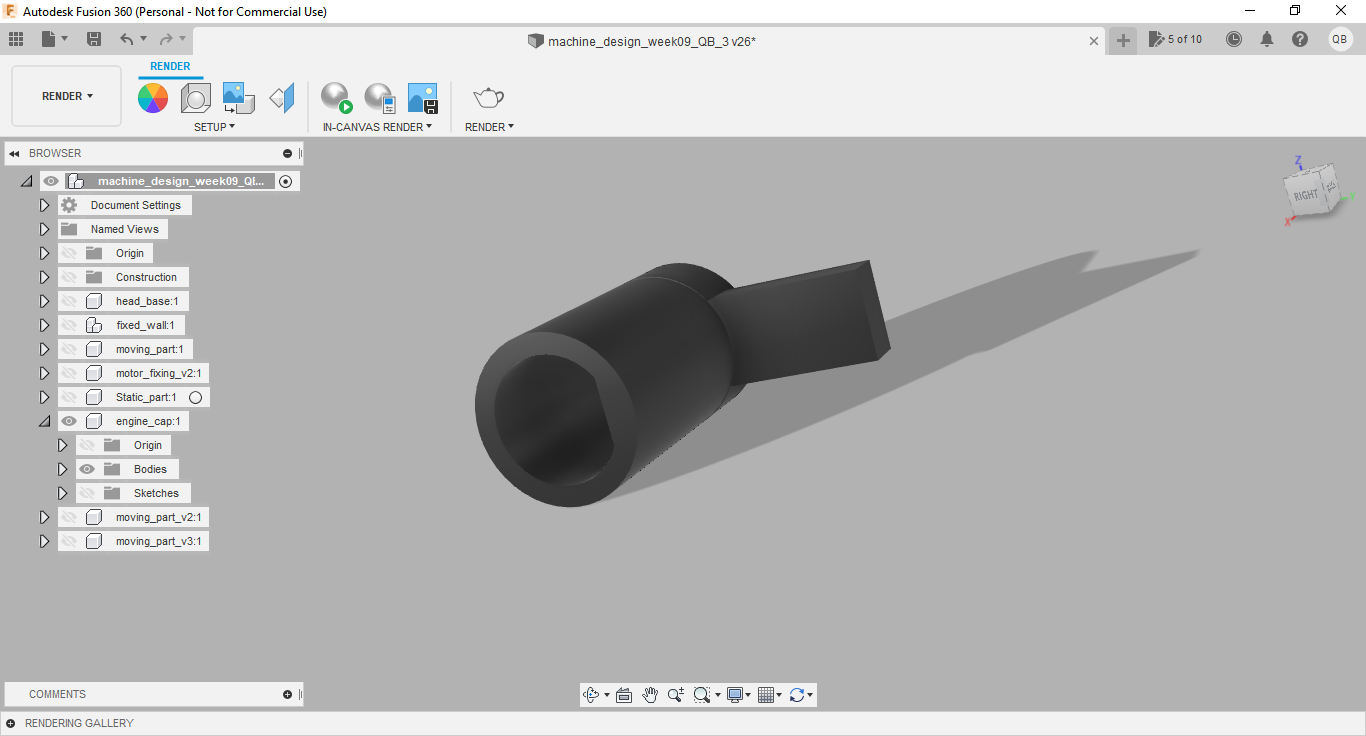 |
|
| Fusion360 moving motor shaft cap | |
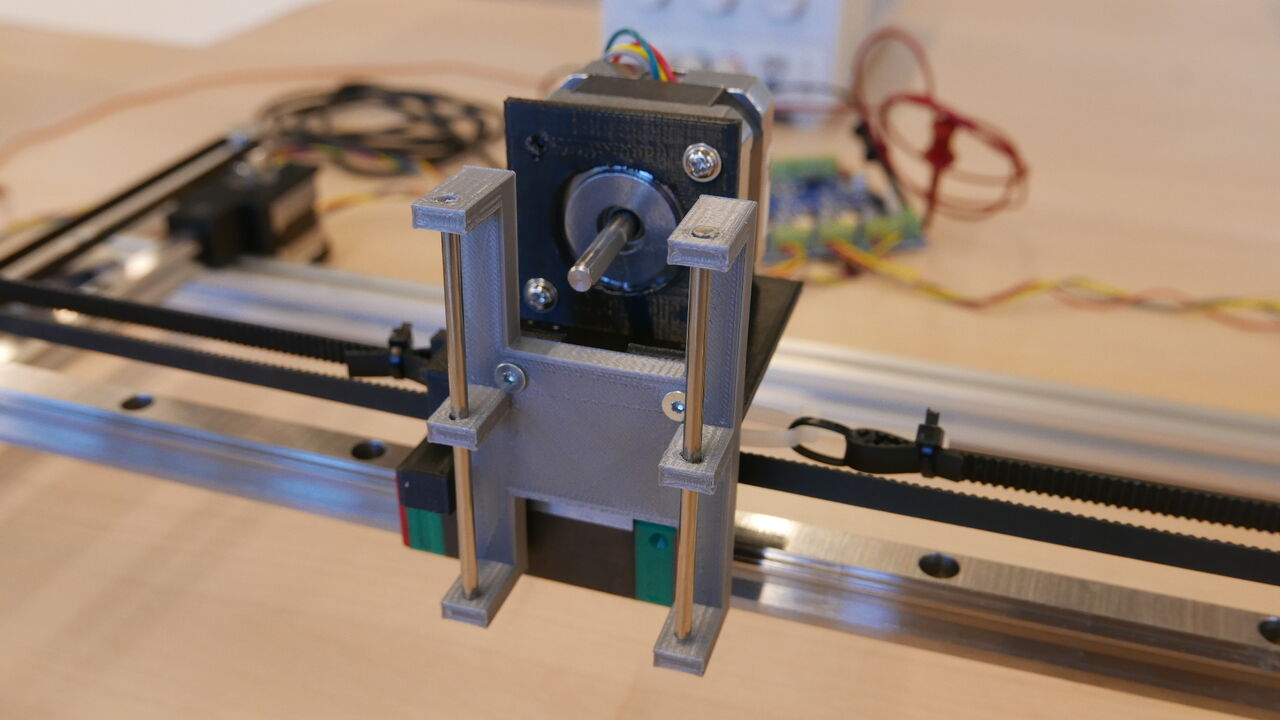 |
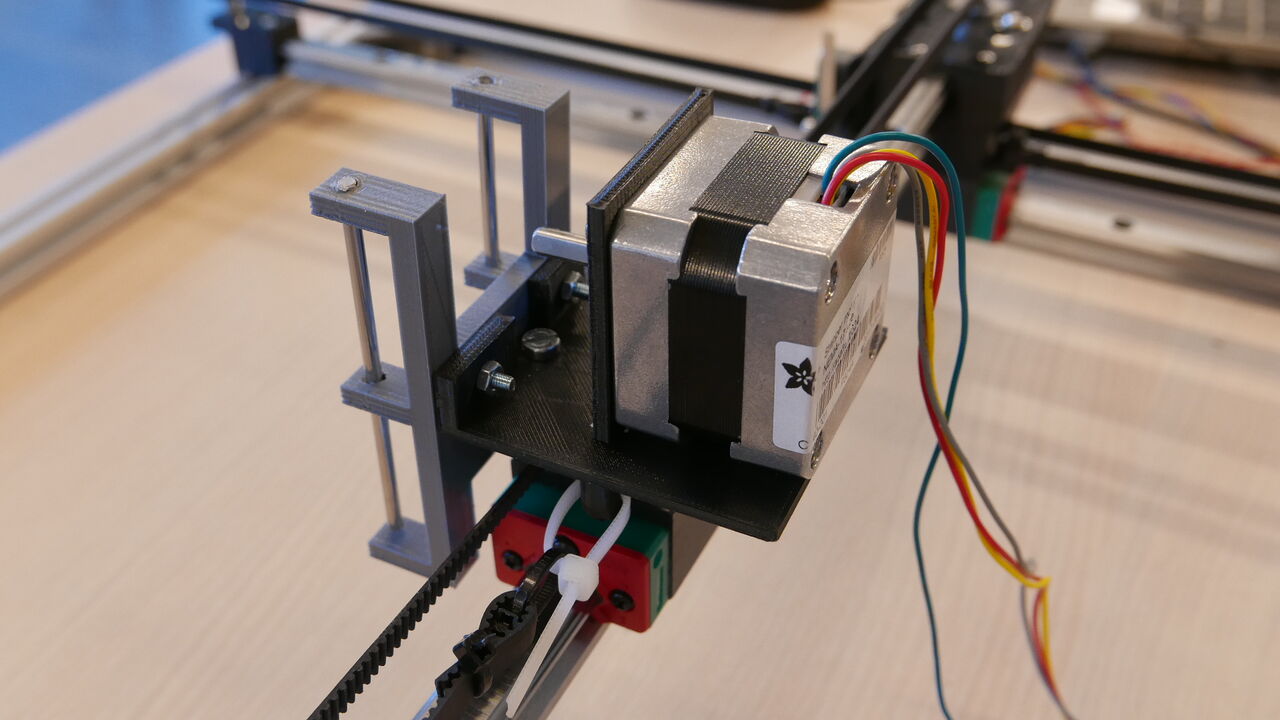 |
| Pen holder - fixed part to allow vertical displacement | Pen holder - motor support |
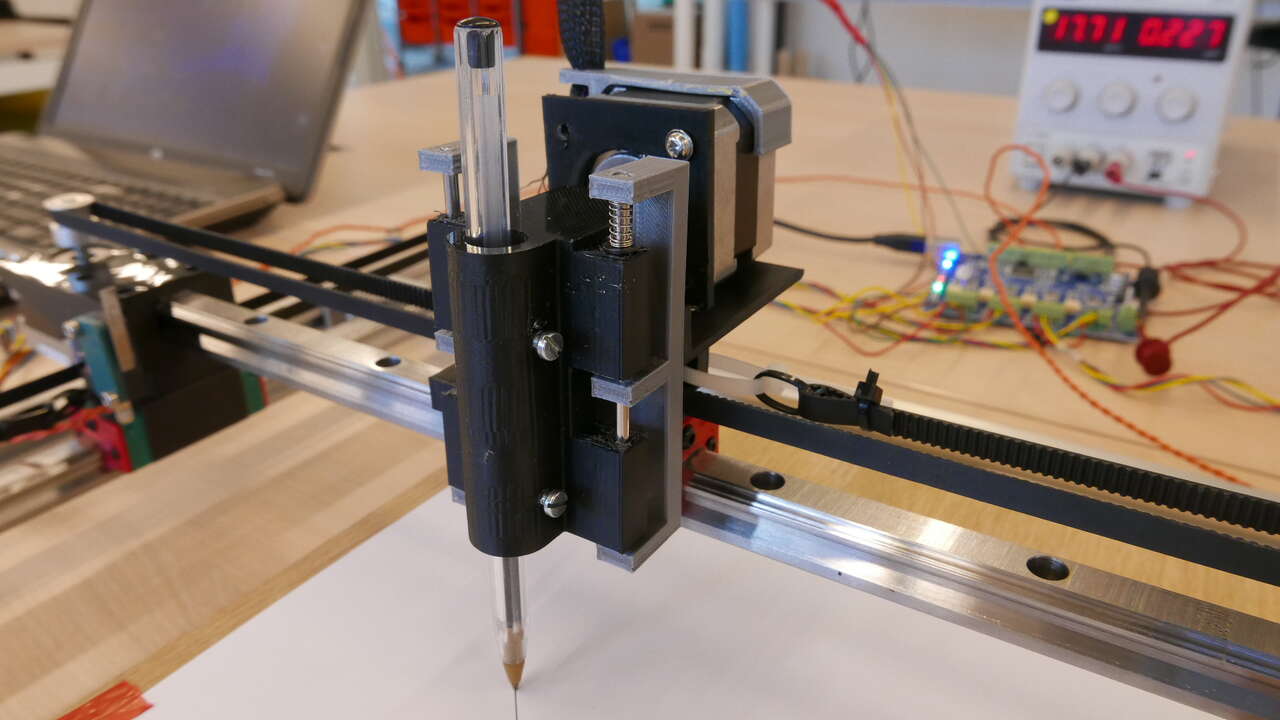 |
 |
| Pen holder - full assembly - front view | Pen holder - full assembly - side view |
Y axis motors and return pulleys supports, frame corner brackets (Selena)¶
Machine assembly (all)¶
Files¶
All the STL files I designed can be downloaded here :
- machine_design_Quentin.zip
- machine_design_Ambroise
- machine_design_Selena
Phase 2 : Machine Design¶
Machine actuation (Quentin + Ambroise)¶
In order to control the motors of our machine, we use a TinyG (hardware v8) multi-axis motion control system. It is mainly designed for CNC applications but can also be used for a wider range of applications that require highly precise motion control. I have been the one in charge of understanding how to use this control system and in this section I will refer to different pages of the TinyG wiki which was very helpful to get our machine running.
Computer configuration¶
Based on our lab instructor’s recommandation, we have decided to use the very convenient browser based user interface Chilippepr to operate the TinyG motion controller. For exhaustive information on the Chilippepr interface and configuration, please refer to the Chilippepr wiki.
So basically most of the steps that are described in this section and the following take place in the Chilippepr interface. Prior to being able to control the TinyG, it is necessary to download and install the following elements :
- FDTI VCP Driver to allow communication between the TinyG and my computer.
- Serial Port JSON Server (SPJS) to allow communication between Chilippeper interface and the TinyG connected to the computer over USB. To be more accurate, it translates serial communications with TinyG to the websocket format. The download link is also available in the “Serial Port Widget” in the bottom right hand corner of the Chilippepr interface. In my case I downloaded the zip file entitled “serial-port-json-server-1.96_windows_amd64.zip”.
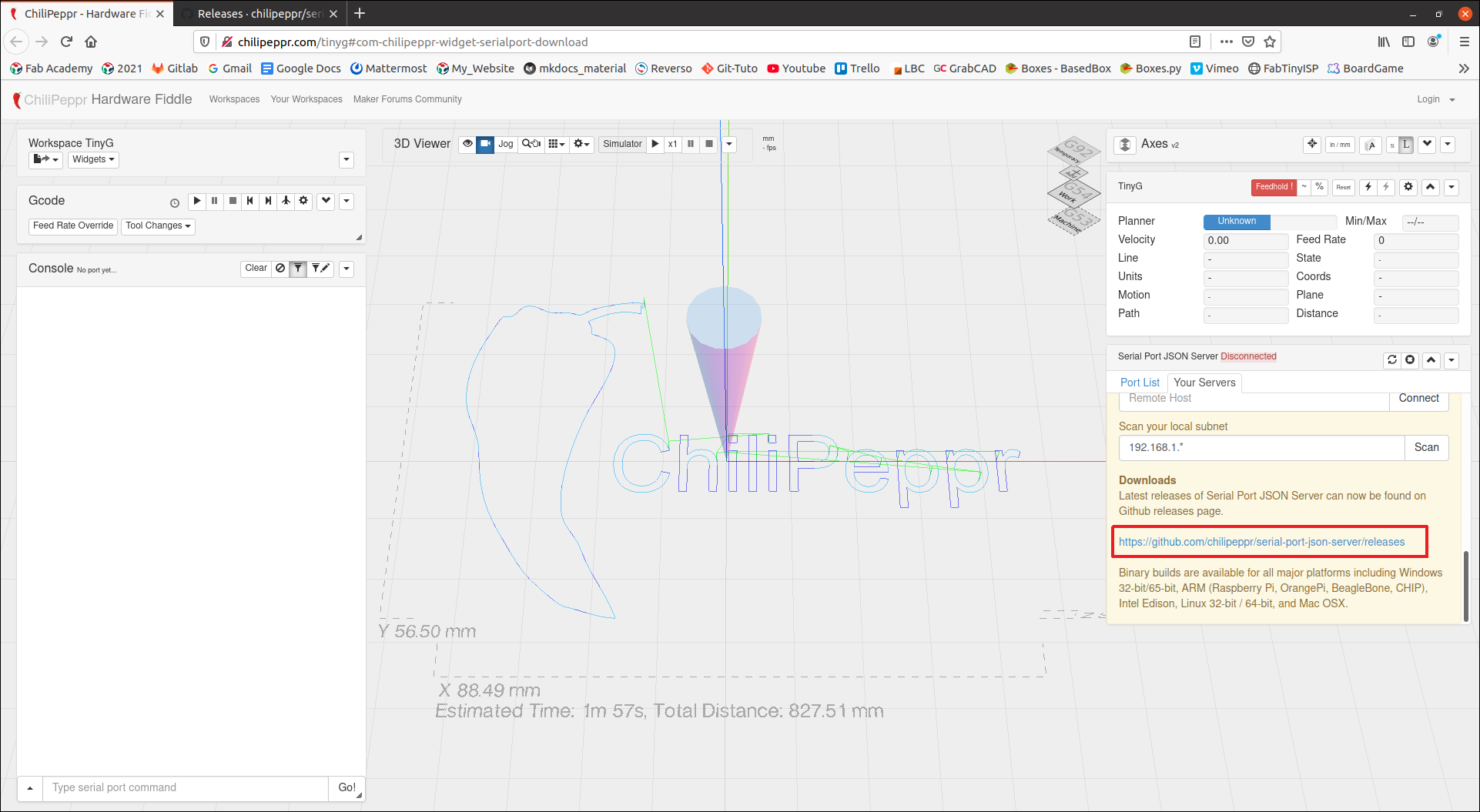
SPJS download
TinyG connection¶
Connect the following elements to the TinyG :
- Computer connected over USB.
- Power supply (between 12 and 30V). Ground must be connected to “GND” and positive side to “Vmot”.
- Stepper motors. Up to 4 motors can be connected simultaneously, using for each of them the corresponding A1/A2/B1/B2 output pins.
- Fan (optional), depending on your application. In our case we did not identify the need of using a fan at the moment.
- End switches, using some of the Xmin / Xmax / Ymin / Ymax / Zmin / Zmax / GND inputs suited to your situation.
Warning: Before providing power to the TinyG, make sure that the power supply is in DC mode and rotate the current trim pots of the TinyG to the minimum or close to the minimum in order to avoid providing too much current to your motors. This will be adjusted later but it is wiser to start with low current.
More information can be foud on the TinyG connection page.
Here below a picture of the TinyG connections for our final drawing machine :
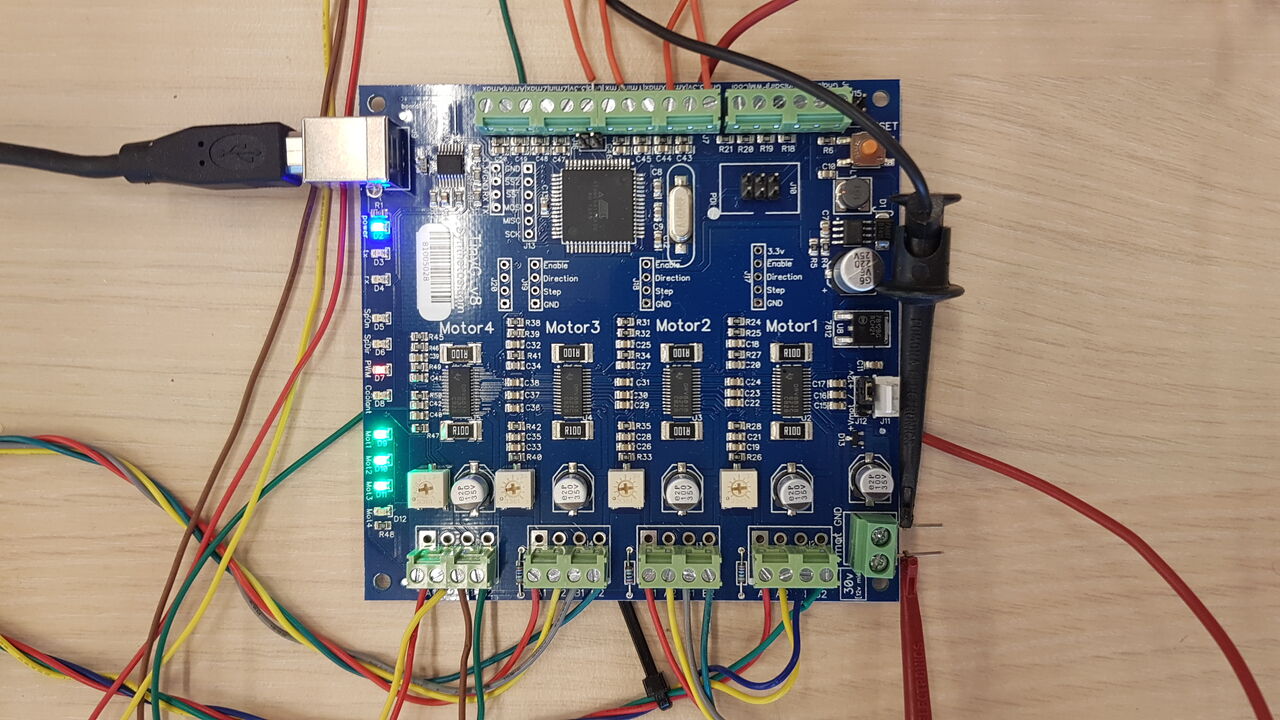
TinyG connections
Then, to establish communication between Chilippepr and the TinyG, connect the TinyG to your computer over USB, and run the SPJS script downloaded previously (as a Windows user : “serial-port-json-server.exe”).
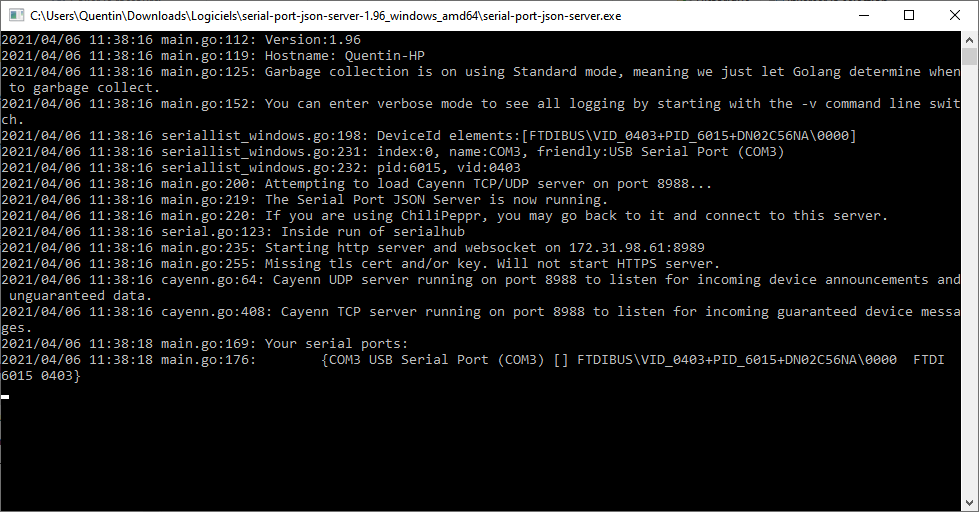
JSON server
Then, in the “Port List” tab of the Serial Port widget, tick the box next to the USB serial port listed.
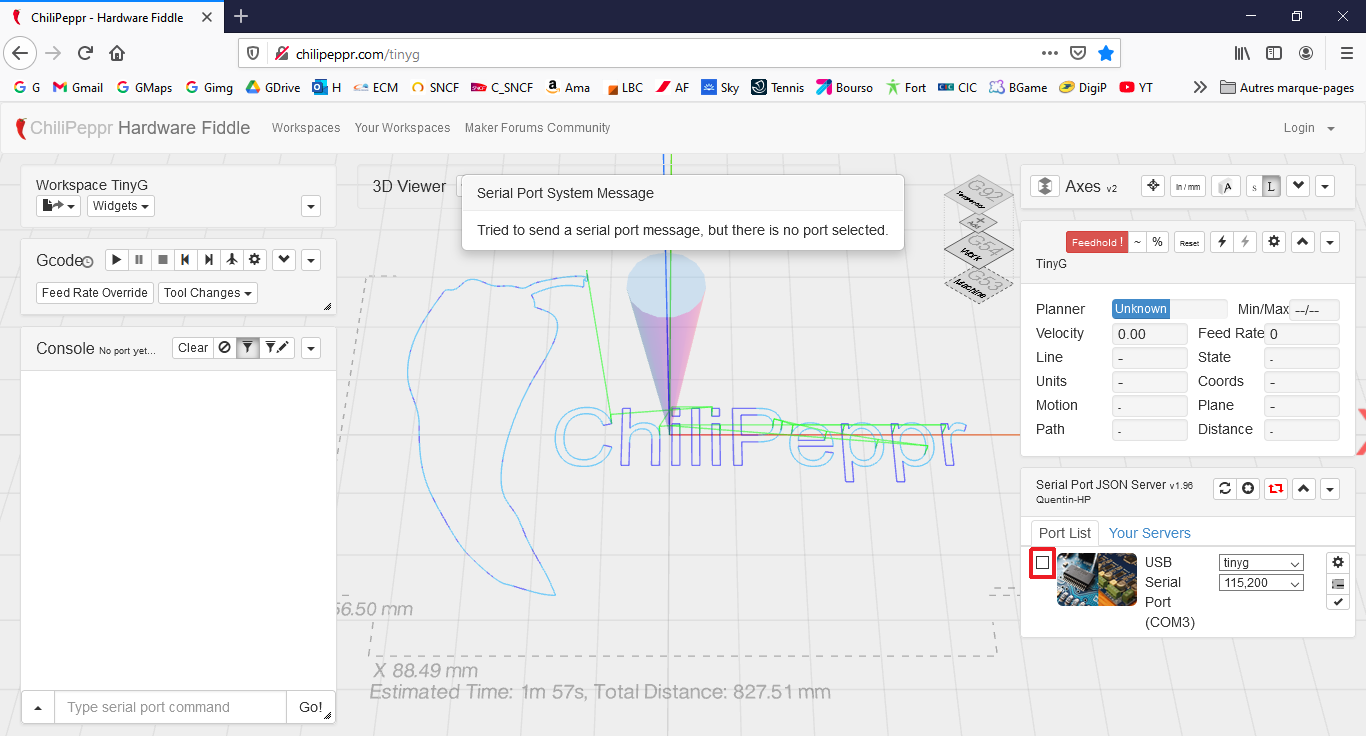 |
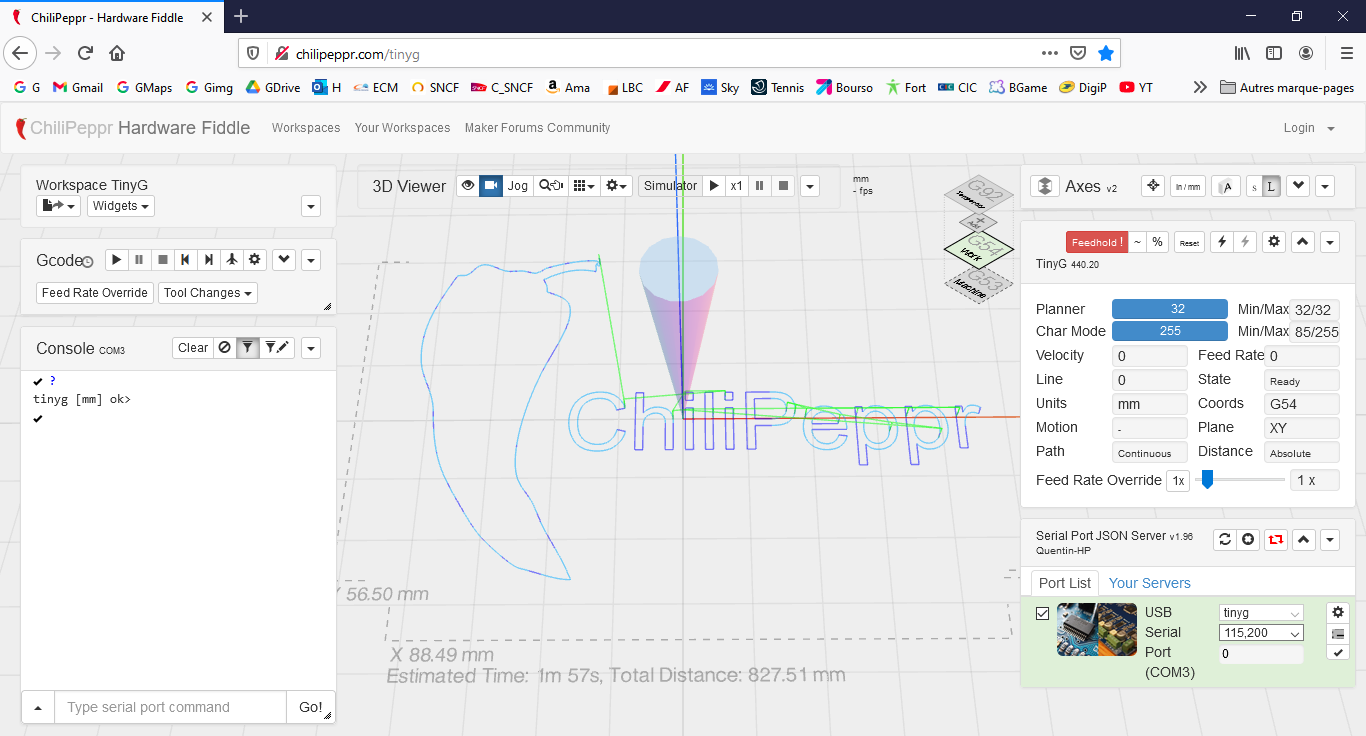 |
| Chilippepr - serial port not selected | Chilippepr - serial port selected |
Note: If you see a message like “You are NOT connected to a Serial Port JSON Server. Go to the “Your Servers” tab and connect.”, it probably means that your SPJS is not running. For further troubleshooting on this issue, a lot of information can be found on the internet.
TinyG configuration¶
The TinyG needs to be configured using JSON (JavaScript Object Notation) file format. In order to establish the configuration suited to our machine, I refered to this TinyG configuration tutorial which contains all the necessary information. Basically, $cmd allows to read a parameter and $cmd=value allows to set a partiular value to a parameter.
I will not give an exhaustive list of the parameters I used for the TinyG configuration but just a few example for motor 1 configuration :
| Setting | Description | Notes |
| $1ma | motor mapping axis | 0=X, 1=Y, 2=Z, 3=A |
| $1sa | step angle | 1.8 in the case of a motor with 200 steps per revolution |
| $1tr | travel per revolution | distance covered on the corresponding axis per motor revolution |
| $1mi | microsteps | either 1,2,4 or 8 |
| $1po | polarity | 0=clockwise rotation, 1=counterclockwise rotation |
| … | … | … |
Note: There are 4 motor groups on the TinyG board, numbered 1,2,3 and 4. The examples given above would apply only to motor 1. In order to configure another motor, simply replace the “1” by the desired motor number.
In a similar way, all axis can be configured, and here below is a few examples for configurating the X axis :
| Setting | Description | Notes |
| $xvm | maximum velocity | - |
| $xtn | minimum travel | in absolute coordinate |
| $xtm | maximum travel | in absolute coordinate |
| $xsn | minimum switch mode | 0=disabled, 1=homing-only, 2=limit-only, 3=homing-and-limit |
| … | … | … |
Note: This time, replace “x” by y,z,a,b,c for configurating other axis. For information, a/b/c corresponds to rotary axis.
Herebelow is presented the complete startup script I created for our drawing machine.
G21 ;mm
;Motors : X axis
$1ma=0
$1po=1
$1sa=1.8
$1tr=40
$1mi=8
;Motors : Y axis
$2ma=1
$2po=1
$2sa=1.8
$2tr=40
$2mi=8
$3ma=1
$3po=1
$3sa=1.8
$3tr=40
$3mi=8
;Motors : Z axis
$4ma=2
$4po=0
$4sa=1.8
$4tr=24 ;arbitrary because no real z axis (value chosen based on the motor shaft cap length of 6mm to control the pen lifting)
$4mi=8
;Axis : X axis
$xvm=10000
$xfr=10000
$xtn=0
$xtm=330
;Axis : Y axis
$yvm=10000
$yfr=10000
$ytn=0
$ytm=330
;End switch:
$st=0 ; normally open
$XSN=3
$XSX=0
$YSN=3
$YSX=0
$ZSN=0
$ZSX=0
$ASN=0
$ASX=0
;End switch X axis
$xsv=1500
$xlv=500
$xlb=15
$xzb=5
;End switch Y axis
$ysv=1500
$ylv=500
$ylb=15
$yzb=5
In order to load this startup script in Chilippepr interface, refer to the following screenshot :
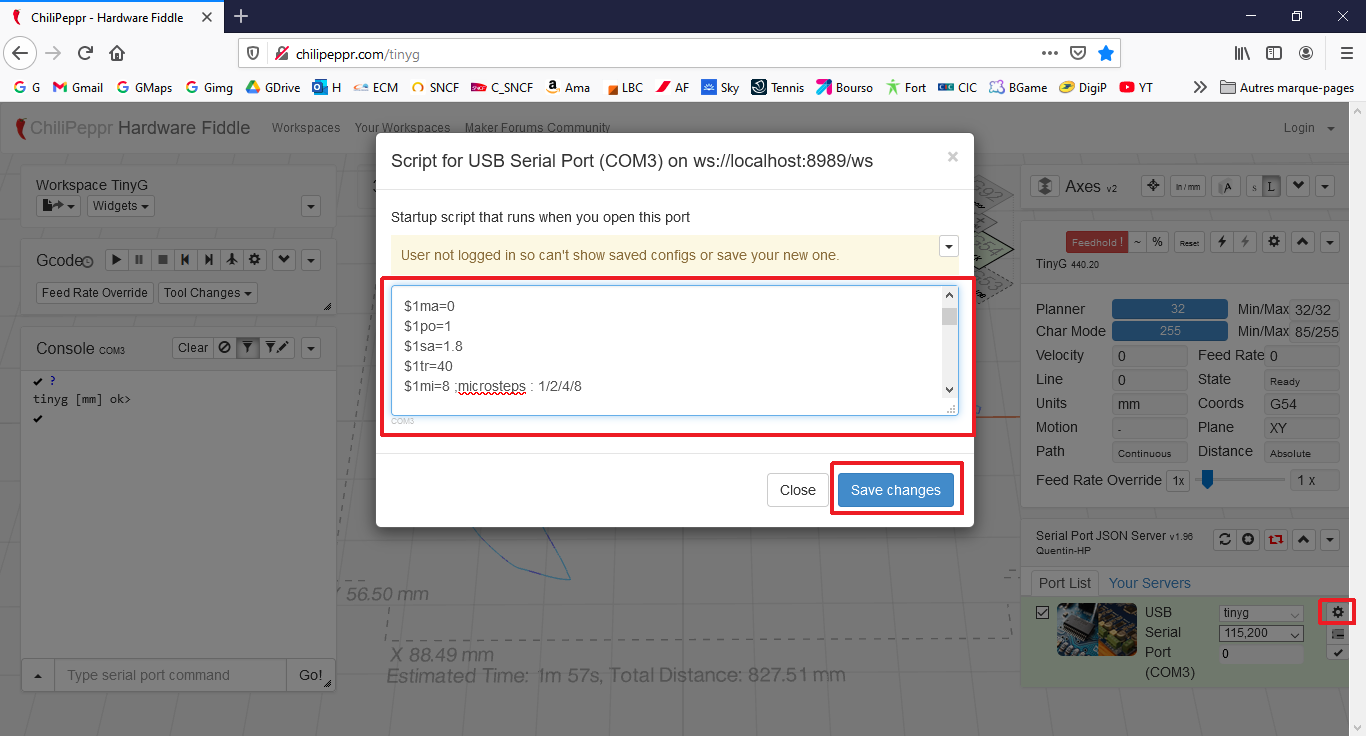
Chilippepr - startup script
Motor control¶
In order to control motors, we need to send G-code instructions to the TinyG. I have been through this G-code introduction page, and here are a few examples of the basic commands that I noted for testing and controling our drawing machine :
| Code | Function | Example |
| G21 | sets units to “mm” | - |
| G0 | rapid move | G0 X150 Y80 F10000 |
| G1 | linear move | G1 X150 Y80 F10000 |
| G28 | move to origin | G28 X Y |
| G28.2 | move until reaching end switches | G28.2 X0 Y0 |
| … | … | … |
Of course tests have been performed step by step and not directly with motors already fitted in the drawing machine.
1 - Made sure that computer configuration was correct and that communication could be established properly between the computer and the TinyG. In order to do so, a single motor has been connected to the TinyG and I tried to control it by sending basic G-code instructions (as the ones indicated in the table above) via Chilippepr.
2 - Installed the motor on what was the very beginning of the drawing machine and tried to obtain a motion along on the X axis. As one may notice in the video, at the time there was not a proper return pulley and the timing belt could jump out of its expected position.
3 - Adjusted current delivery to the motor and axis/motor settings to obtain a fast and smooth motion along the x axis. Indeed, as can be observed on the above video, motion was rather slow and not very smooth. By updating parameters $xvm=10000 and $xfr=10000 we obtained a faster movement, however it was still jerky. We managed to fix this problem by setting the microsteps parameter to 8 : $1mi=8.
4 - Installed and configured the end-switch at X-min location. This homing tutorial was of a precious help to configurate the TinyG for end-switch usage. Pretty quickly we obtained the expected behaviour presented in the video below :
5 - Once the motion on the X axis had been validated we could proceed to 3D print the parts for the Y axis assembly. We have made the choice to use 2 motors in parallel for controlling the motion on the Y axis as the weight to be moved was more important on that axis. After assembling the parts together, and based on the experience we developed in the previous steps, we rapidly set up the additional TinyG connections, and adjusted TinyG configuration to obtain motion and end-switches fucntions on both X and Y axis.
The first version of our drawing machine was now ready for being tested !
Sending G-code files for drawing (Ambroise + Quentin)¶
To be able to draw something, our machine needs to be given a G-code file with a list of instructions, so we have to convert a .svg drawing into .gcode file. After having faced difficulties to perform this task directly in Inkscape, we finally used JScut, which is a Computer Aided Manufacturing web based software that allows converting SVG files to CNC cutting paths.
Here are the main steps to obtain a G-code from a SVG file :
1 - Load the SVG file to be converted into G-code.
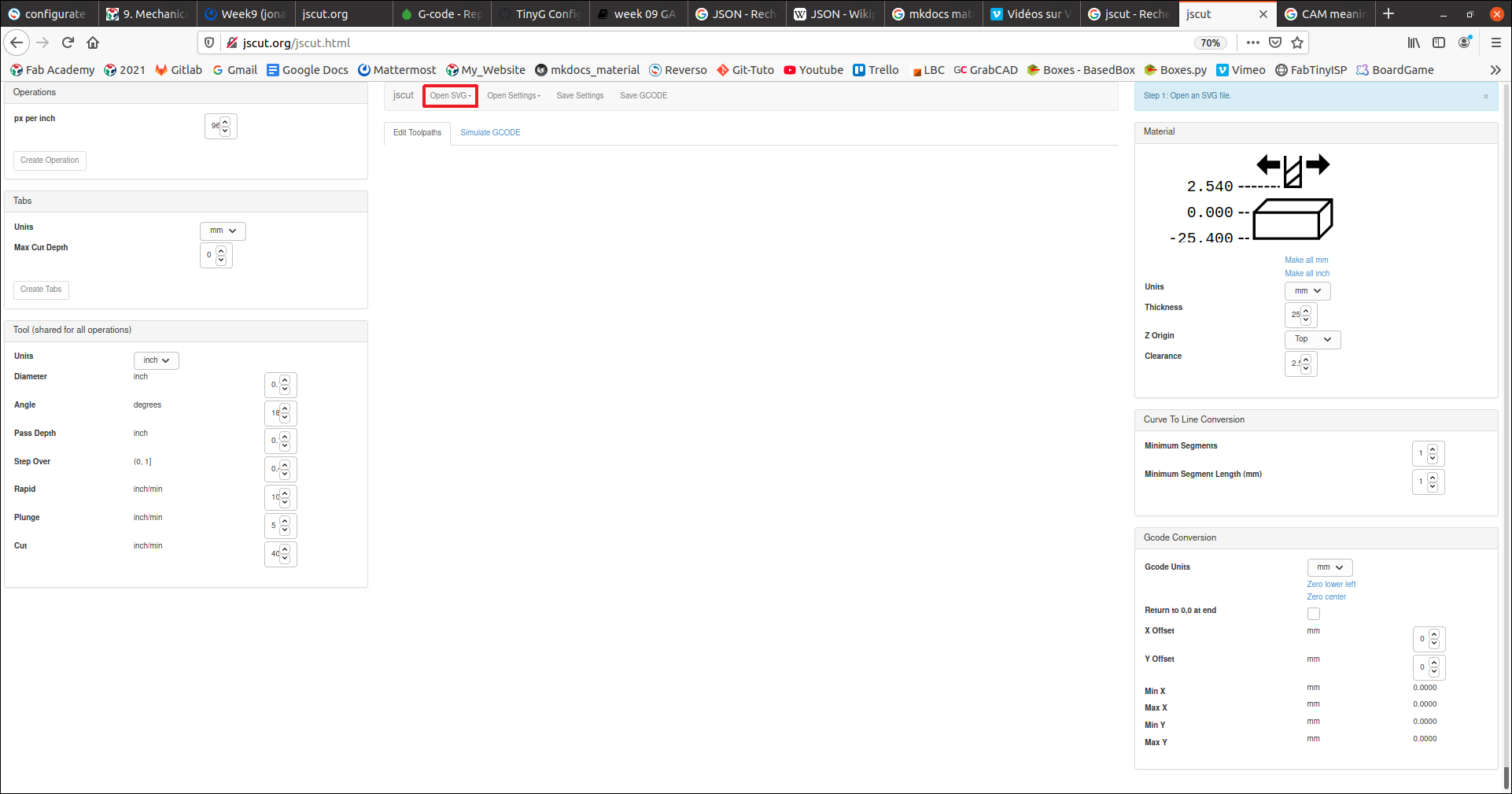 |
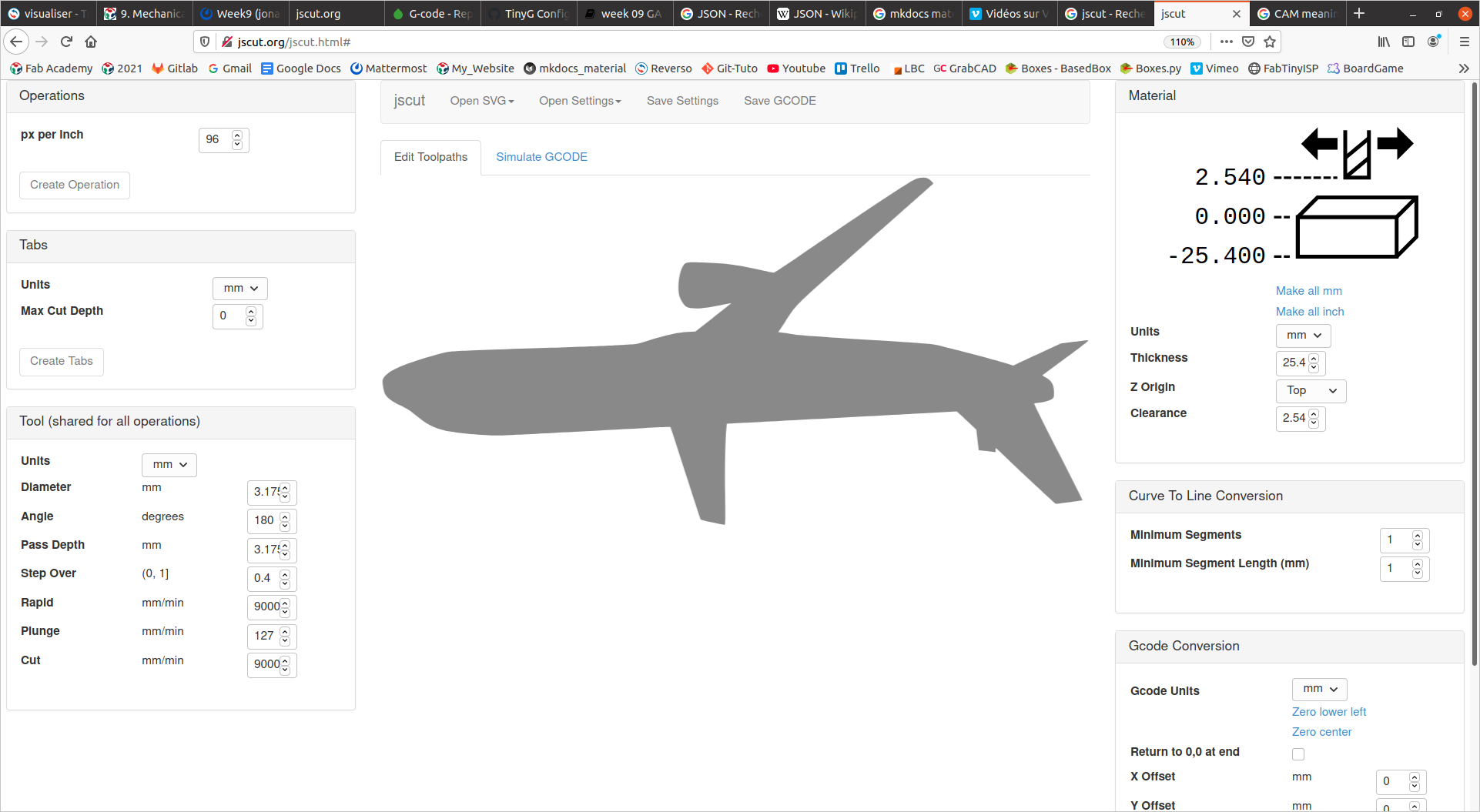 |
| Jscut - Import SVG | Jscut - SVG imported |
2 - Set all units to “mm”, set the parameter “Minimum Segment Length (mm)” to 1 or more (otherwise the machine will be very slow to draw curved shapes), and set “Rapid” and “Cut” speed parameters to the desired values (in our case it turns out that around 10 000 mm/s for both those parameters is a nice balance).
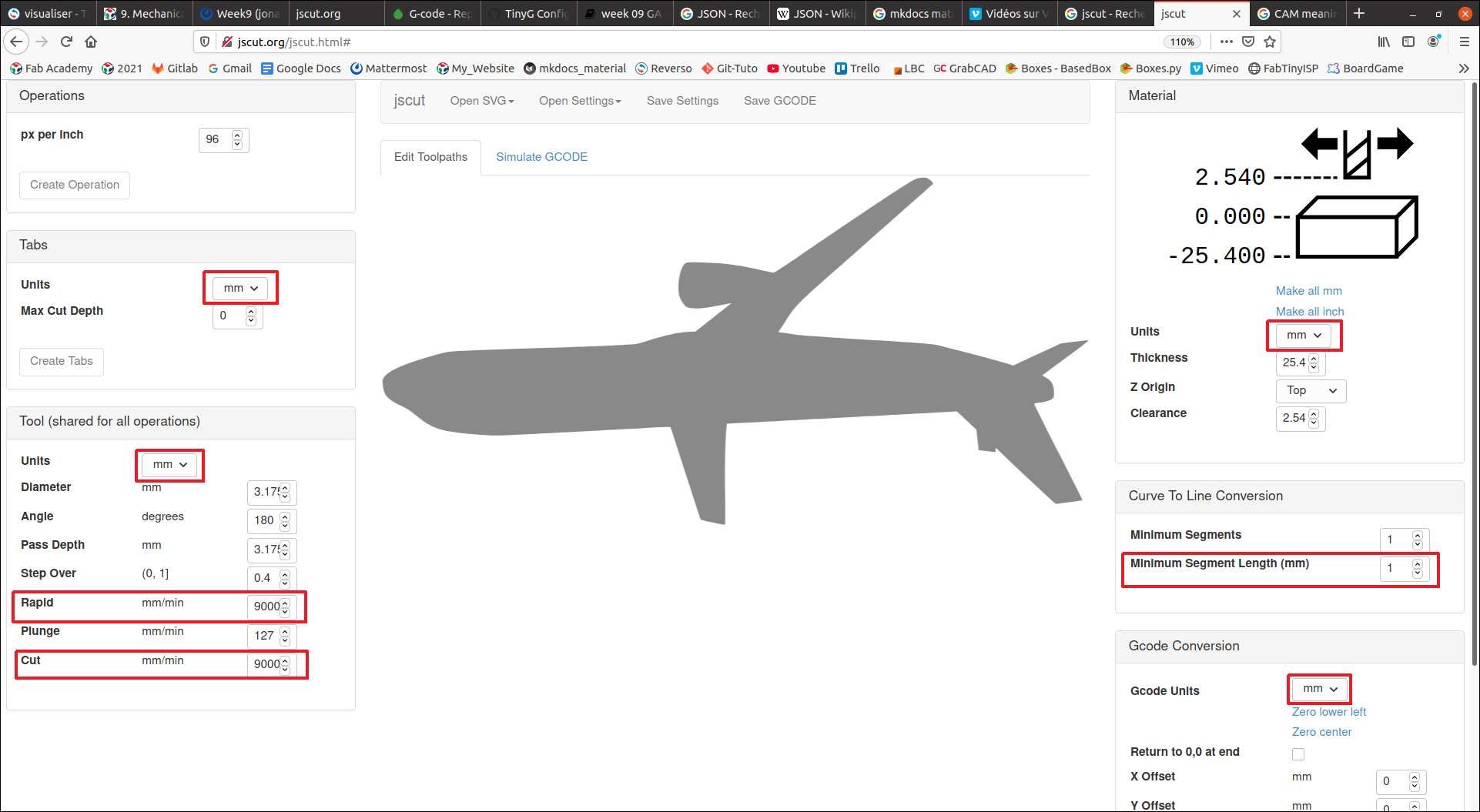
Jscut settings
3 - Select the drawing in the interface (it turns blue) and hit the “Create Operation” button.
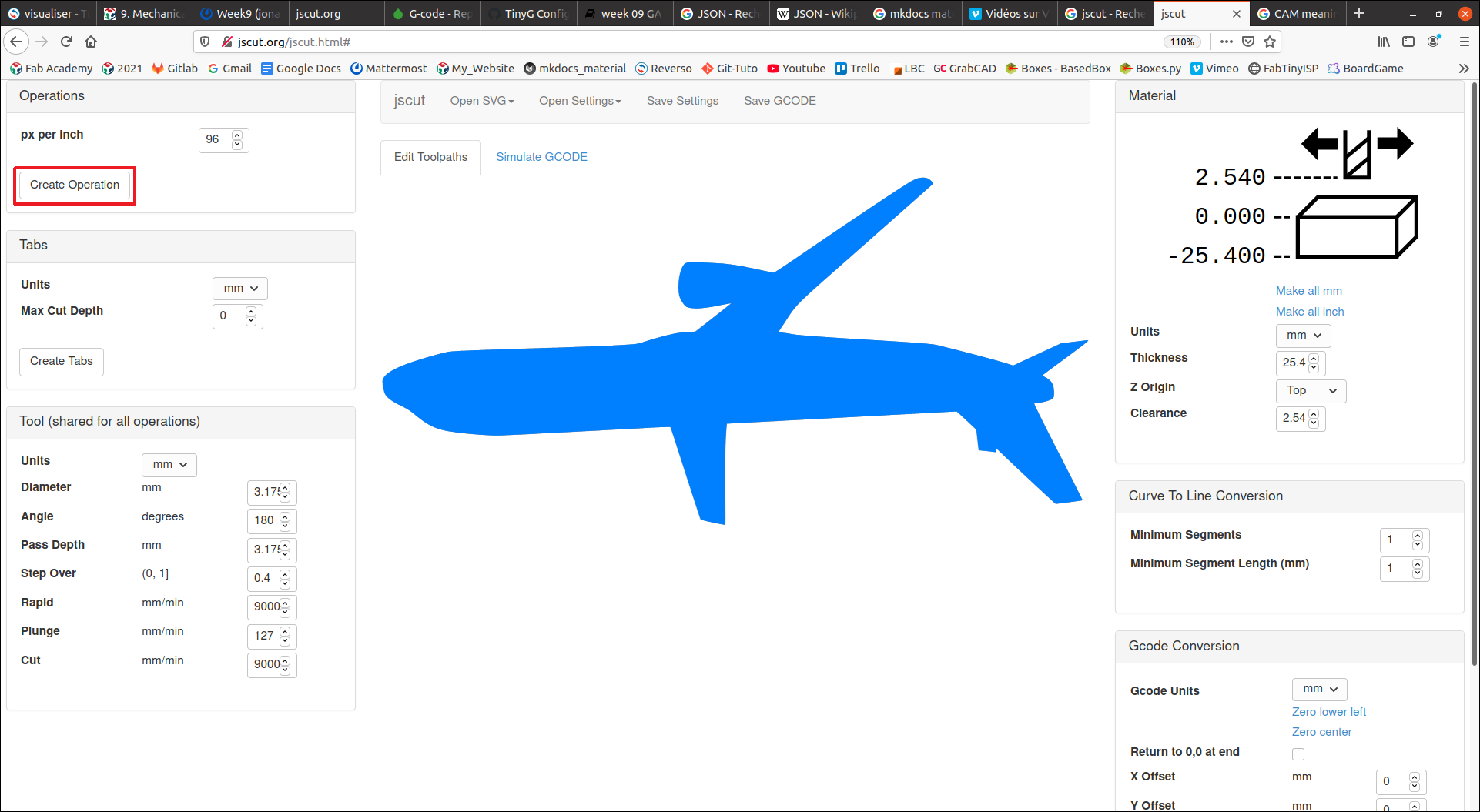
Jscut create operation
4 - Select “Engrave” and hit the “Generate” button.
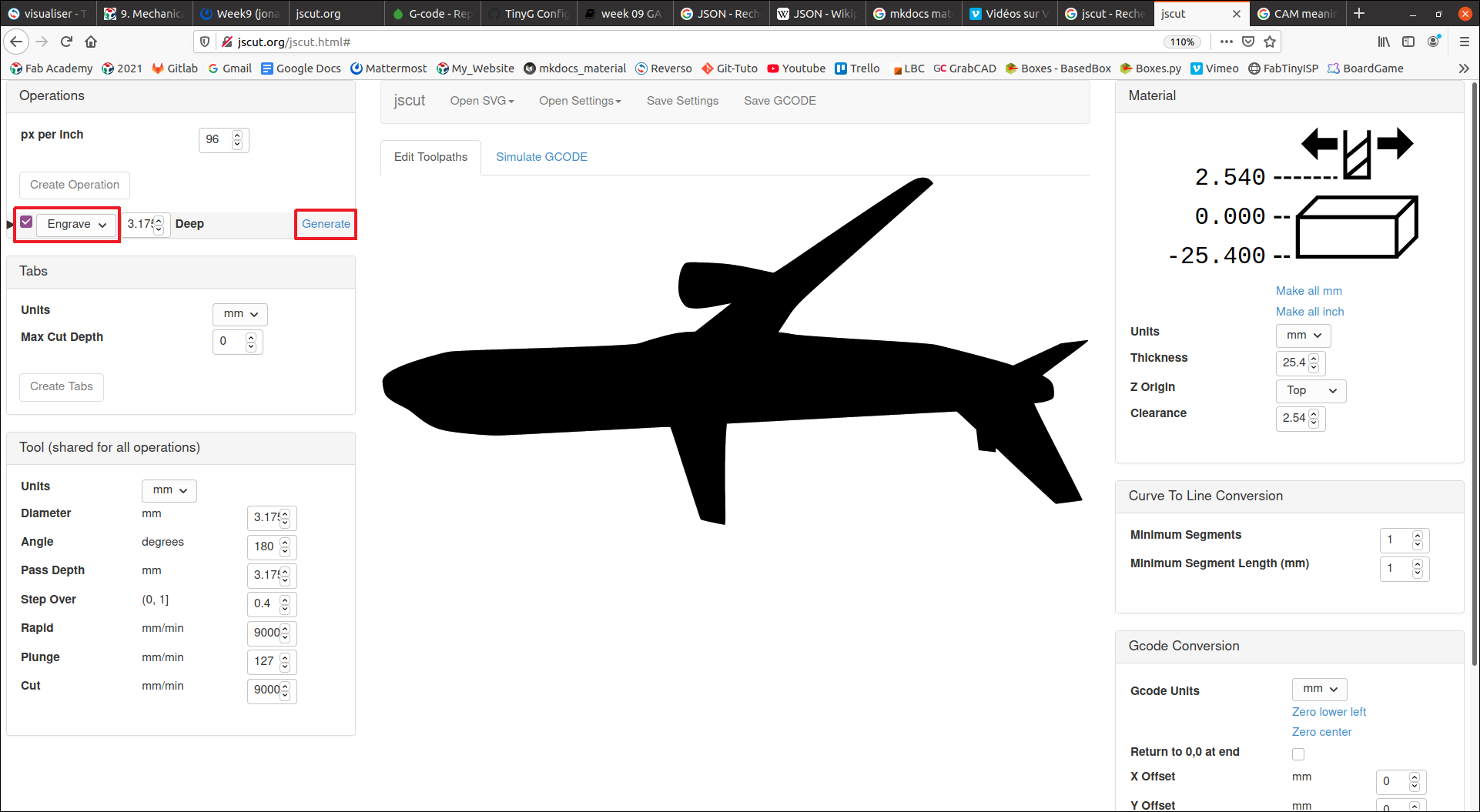
Jscut generate Gcode
5 - Visualize the simulated path in the “Simulate GCODE” tab.
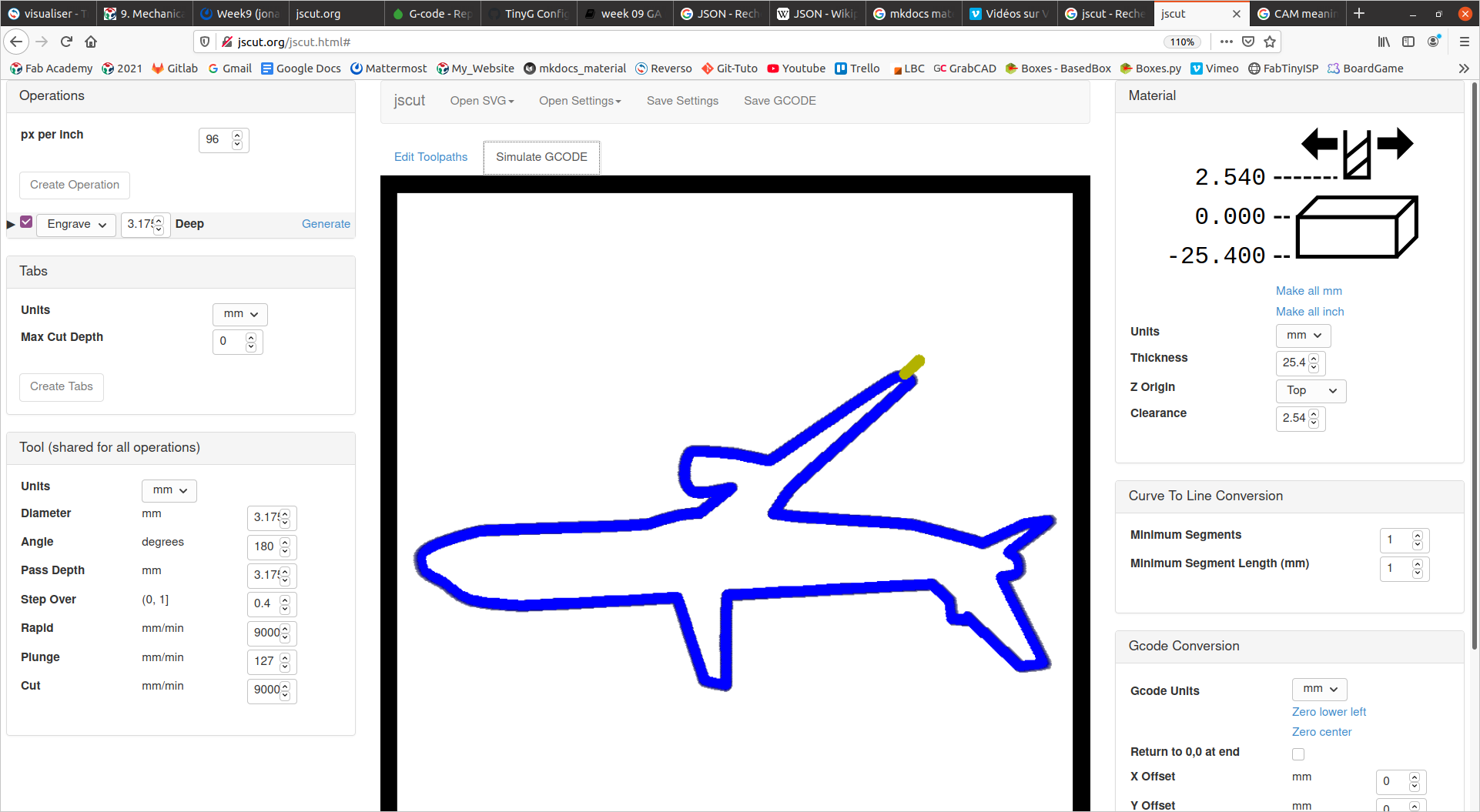
Jscut preview
6 - If you are happy with the result, save GCODE to a file on your computer.
Note: Because of the coordinate systems we have chosen for our machine (X positive when going from left to right, and Y positive when going from the back of the machine to the front), if we want the drawing to be on the correct orientation we currently need to mirror our drawing along the Y axis before saving the SVG file. I am pretty sure that there is a better way to solve this minor issue but we had not time to investigate on it yet.
Once the Gcode fils is ready, simply drag and drop it in the Chilippepr interface, and click on the start button.
After a few first tests unsuccessful because of non perfectly flat and non-fixed surface for drawing, and after resolving low speed issues for curves, we managed to achieve good results as can be seen on the videos below :
Screencast of Chilippepr interface while drawing is ongoing (note : the drawing in this video is not the same as the one presented in this section) :
Pen lifting feature (Quentin)¶
Once that our machine was able to draw with a fixed pen, it was time for us to test the system I designed to control pen lifting along the vertical axis so that the pen can move from one point to another without being always in contact with the drawing surface.
The ideal would probably have been to use a servo motor for this application but unfortunately it does not seem possible to control a servo motor with the TinyG. I then tried to use a small 5V stepper motor 28BYJ-48 but I only managed to make it rotate in one direction which was not satisfactory for our need. As time was running, I thus decided to keep it simple by using the same model of stepper motor as the ones controlling the motion on the other axes of the drawing machine. It appears a little oversized for this application, but it definitely does the job !
After few adjustments in the TinyG settings to control this additional motor, few tests with the motor not yet fitted in the machine, few madjustments in Jscut to deal with the vertical motion, and few manipulations in Chilippepr to fix the zero position on the vertical axis, I was ready to test it for real ! It turned out to work exactly as expected as demonstrated in the videos below :
Front view :
Side view :
Conclusion and further work¶
First of all we are happy and proud of the machine that we have designed and built in this short amount of time.
As for future work :
- Understanding how to modify the coordinates system either in Jscut or Chilippepr to match the coordinate system that we have chosen for our drawing machine.
- Fixing the buffer issues we sometimes face in Chilippepr that causes the machine to suddenly stop while a drawing is ongoing.
- Adding a flat support for drawing, with a system (more appropriate than tape) to hold the sheet of paper or other material in place.
- Working on the electronic TinyG board and wires integration.
- Designing the box to create a dark environment for the light painting application that we had imagined.