3D Design
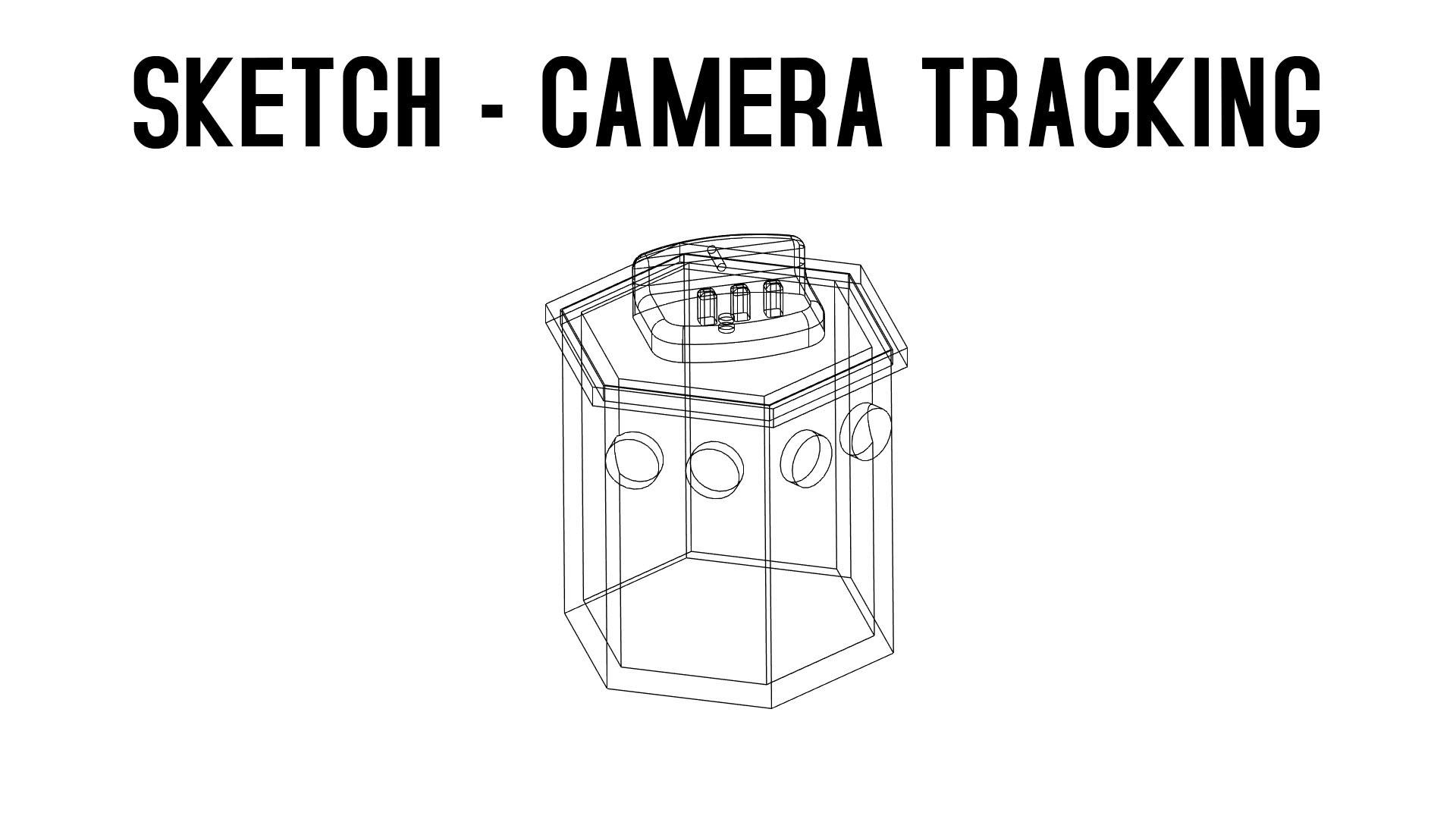
The following figure represents the design that I will work on through Fusion 360, I have relied on this in my design on many factors, including taking into account the angle between my Ultrasonic Sensor, where I did a simple process to measure the distance or angle that needed to be placed in the design to ensure that the two Ultrasonic Sensors work together And by measuring this distance, I gave the sensors more facilities while entering the target person into the Ultrasonic Sensor range and made the first sensor compatible in the process of sensing the person’s motion with the second sensor so that no wrong operation would occur that would make the sensor unable to distinguish or go left and right .
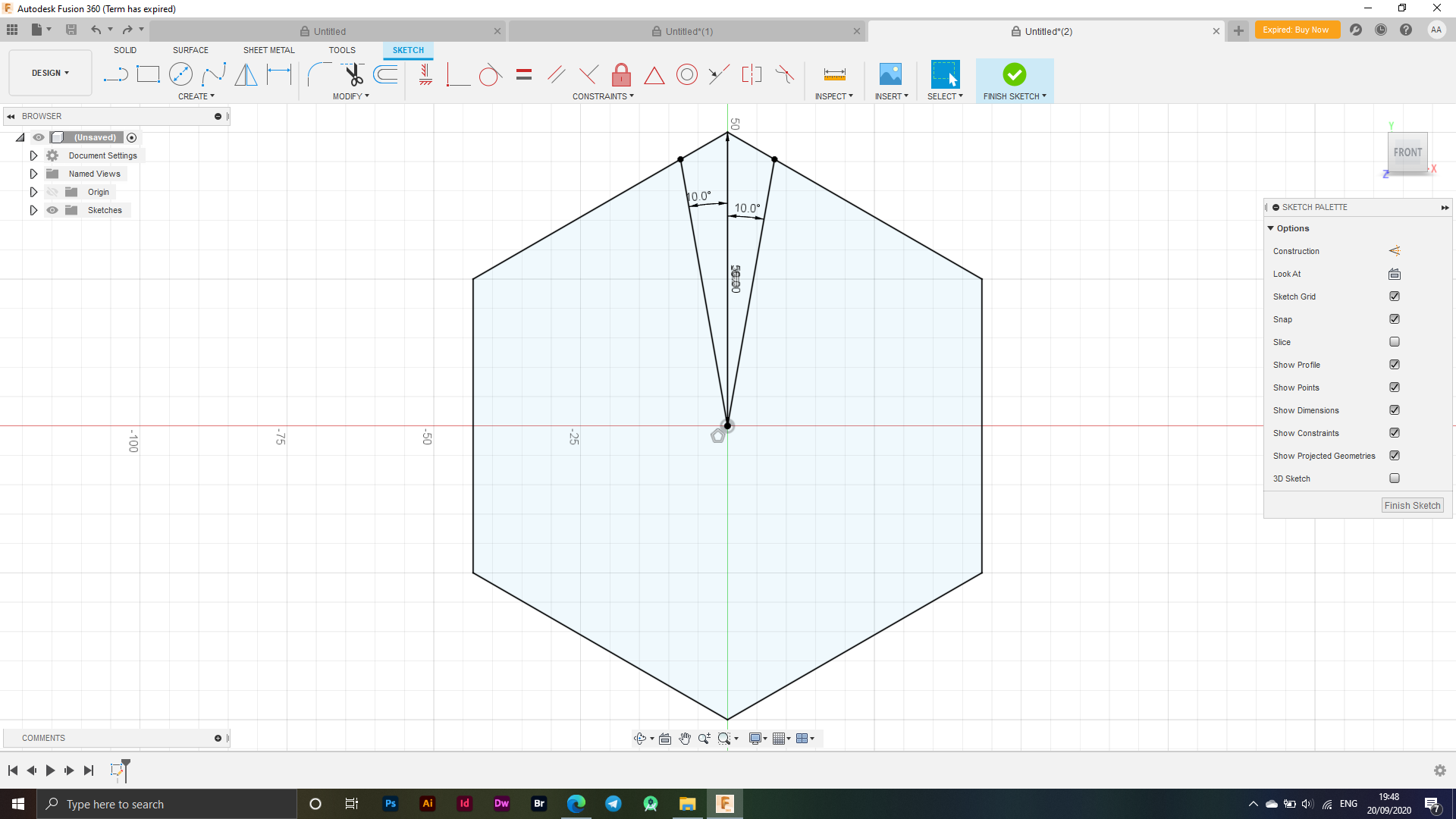
I used the ready-made hexagonal shape by default in the Fusion 360 program with a diameter of 10 cm, in addition to that I will use my Ultrssonic Sensor, so I put places for them also by knowing the dimensions of the sensors and applying this directly to the design, the following picture shows the external hexagonal shape of the design in addition to the locations of the sensors Taking into account the angle that will be between the sensors that I calculated and got an angle of 20 with a radius of 5 cm, I'll detail later on how to calculate the angle between them.
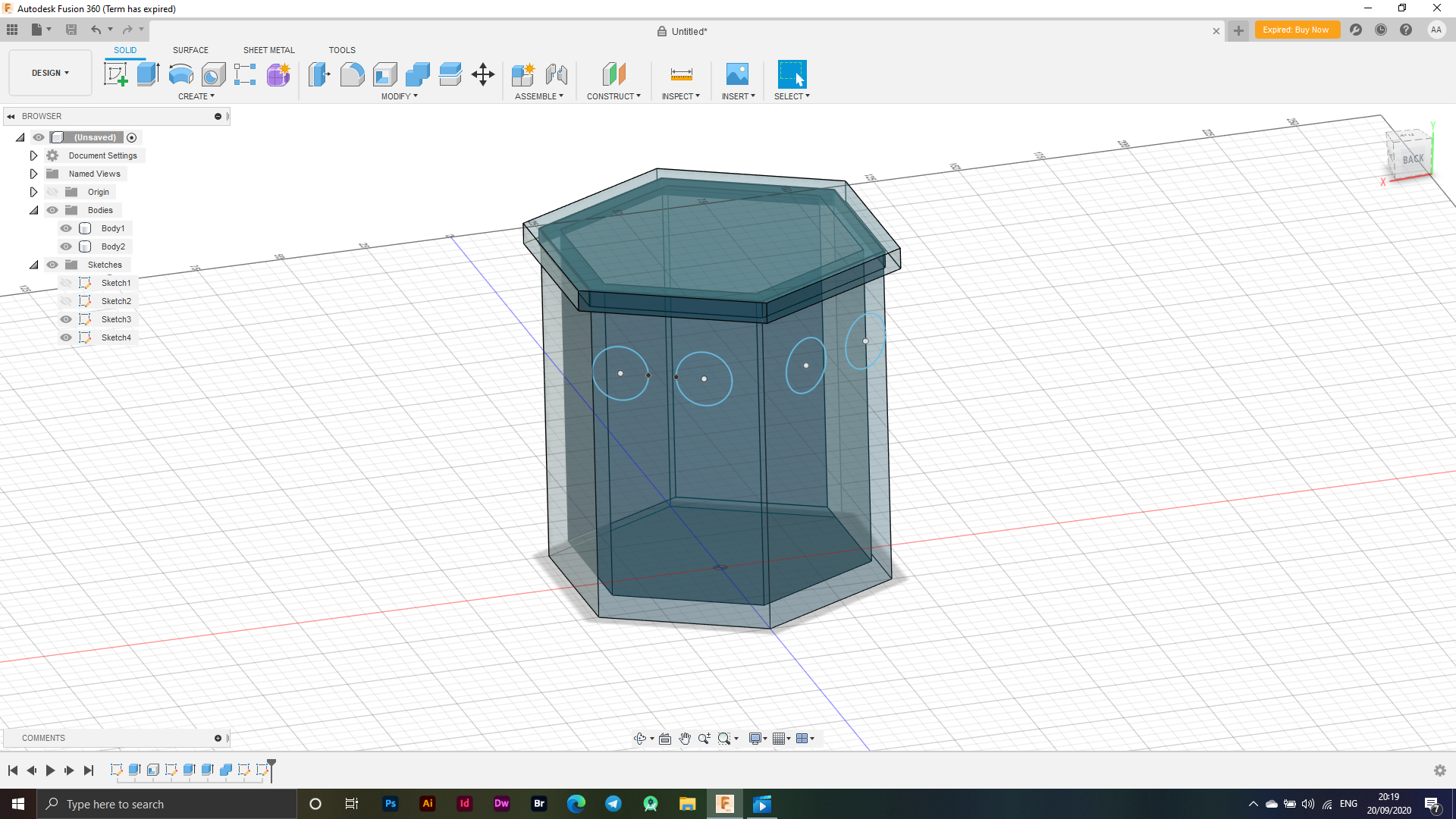
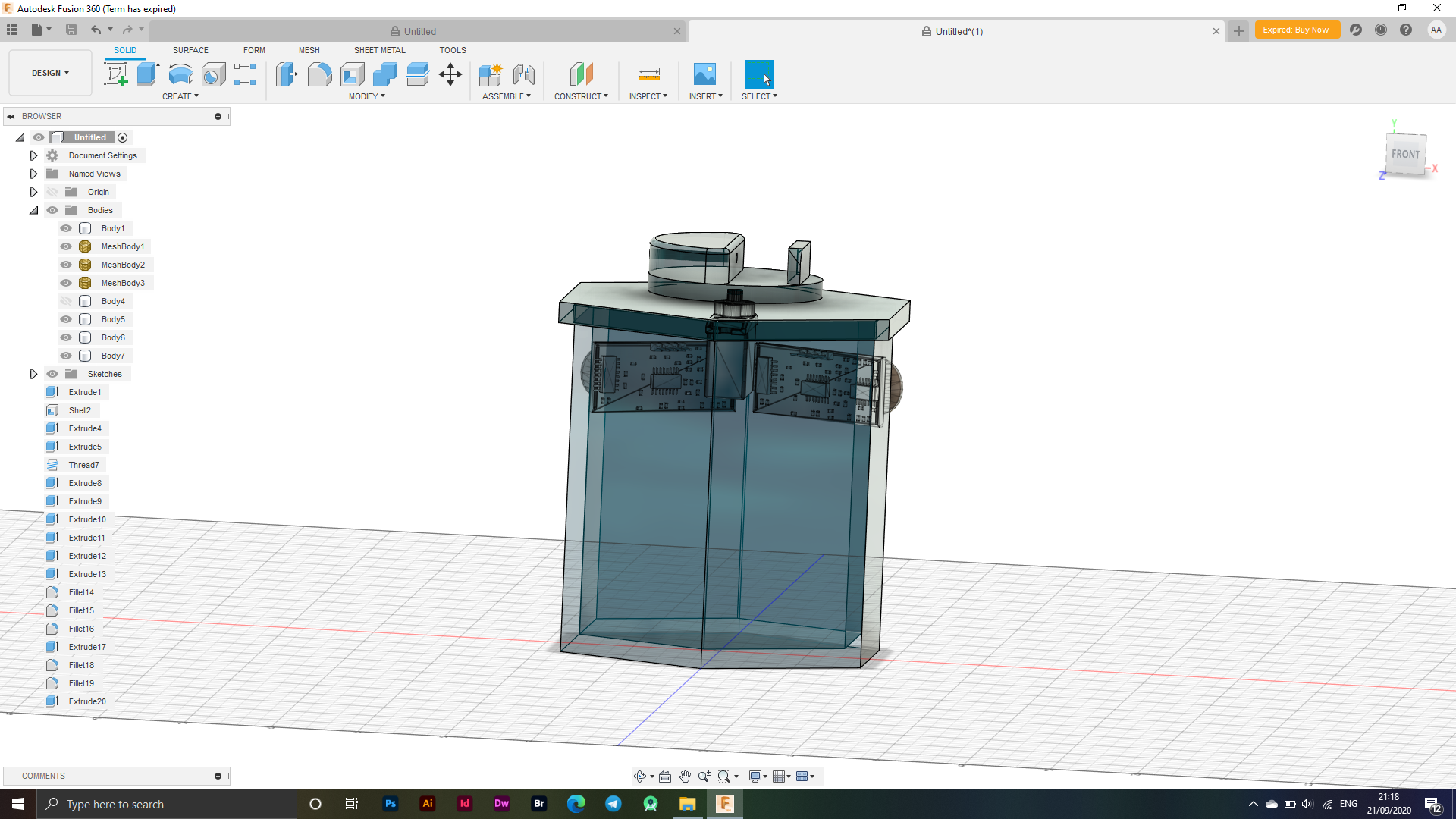
I will be using the 3D printer in the process of printing the design so I converted the shape into 3D so that I can export it in STL format.
The image below shows the final shape of the design and the position of the sensors in addition to the Servo Motor, which will move the platform or the stand it is raised on at a certain angle. The stand is designed with specific and precise dimensions so that it is able to carry the phone or camera that will be placed on it.
The materials used:
Files - Open Source
Design - F3D