Week 18, Invention, Intellectual Property and Income
Table of Contents
- Dissemination Plan
- Future Possibilities
- What tasks have been completed, and what tasks remain?
- What's working? What's not?
- What questions need to be resolved?
- What will happen when?
- What I learned
Dissemination Plan
My project is mainly aimed at people who want to explore simple robots and maze-solving programs, which is schools, I guess, since one robot can let them share these with multiple students. I'll share everything in my documentation of Fab Academy. People can just copy everything to remake the robot. The robot will be shared as "Carrier-Bot" since it's the name I gave to it in Fab Academy.
I won't really be advertising this robot myself. Fab Academy itself and my video in the final project week is advertising in itself, so that should be enough for a project of this magnitude. Every time someone gets interested in Fab Academy, decides to look through other people's documentation, and finds mine, they'll be advertised of this robot. Also, future Fab Academy students stressing about the final presentation, checking past years' presentations may also see this robot. This means that the advertising is self-sufficient.
I'll be sure this plan was successful when the plan was successful when I hear about my project or see my project being remade by other people.
Licensing
I choose CC BY-SA for the license of this robot, which means that it can be shared, adapted, and used commercially with attribution. However, with CC BY-SA, the derivatives must use the same license.
Before continuing, I want to mention that you should push everything before continuing to do the things below. You'll need to pull after adding the license, and if you change anything (after pushing, before pulling) in the local repository, there'll be a merge conflict when pulling.
I clicked here, which is to the right of my GitLab page.
From here, I clicked the template choosing button and chose this.
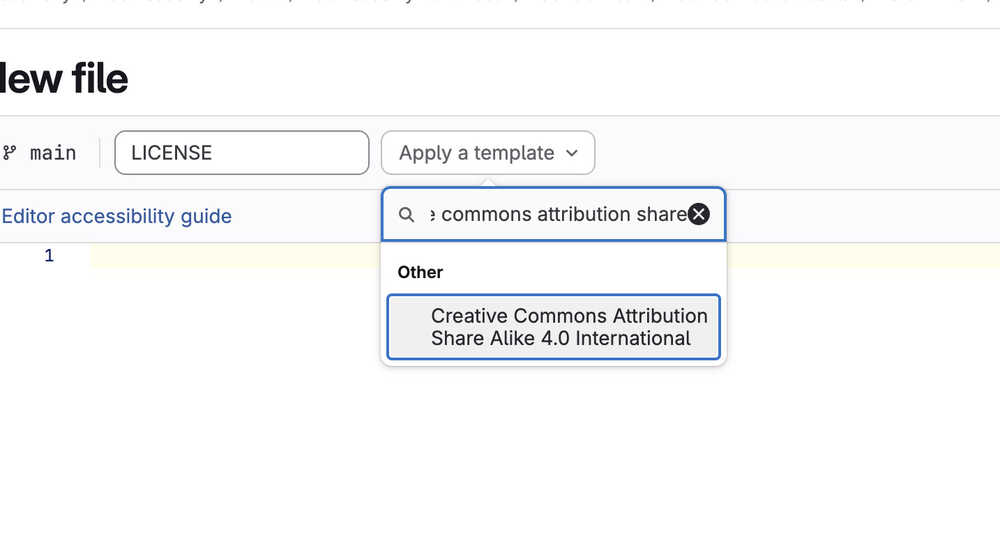
Then, I clicked "Commit Changes".
Future Possibilities
My first final project idea can be built on top of this to actually make a robot that comes to the user and carries items, which would be a product that can be sold.
More and more maze solving programs can be inputted to this robot to demonstrate and can be used as an educational tool. The documentation is clear enough and the files can be accessed, so replication it isn't hard at another place in the world.
The "Control it Yourself" aspect and the design can be improved to turn this robot into a toy people can play with .
The maze itself can be used to help create a competition about maze-solving algorithms.
Since it isn't complicated, the robot's design can be used to make a robot with a whole other purpose.
What tasks have been completed, and what tasks remain?
The robot needs to be able to change between maze-solving programs.
- Haven't added other maze-solving programs yet.
The robot needs to be able to detect the goal when it reaches it.
- Haven't added a material for that yet.
The robot needs to be able to move precisely in the maze.
- Haven't tested the robot in the maze yet.
The robot needs to be able to stop when the stop button is clicked.
- Haven't programmed the stop button yet.
The robot won't deteriorate easily (as in, it wont just break down in a few days).
- Not many days went by, so there isn't really anything I can do about this. But, the robot seems strong enough to not break.
What's working? What's not?
The first maze-solving program works.
The robot can move.
The parameter setting screens work.
The external power supply works.
The ToF works.
The maze tiles work quite well.
The stop button isn't finished.
Other maze-solving programs haven't been programmed yet.
The win-lose response in the site isn't there.
There's no "random maze generation" button yet.
There's no "Control it Yourself" section.
What questions need to be resolved?
Can the robot move precisely in the maze?
- Haven't tried the robot in the maze yet.
Will the system integration work well?
- Haven't done a drop test but it seems strong enough.
Will the robot be able to detect the goal?
- Haven't tried this yet.
Can the device survive a drop test?
- Will do a drop test later.
Will the device be used as intended?
- This relies on the hands of other people and the future, so not really anything I can do to answer this question.
What will happen when?
In my future free time or as a project in university, I want to continue this project to make my first final project idea. Don't get me wrong, I quite like the current version and it has a different uniqueness to it compared to my first final project idea. However, I can't use this at home (or at least I have no reason to), I don't really need it in my life, and, if I don't use it for fun, it'll just collect dust somewhere (or will be donated to my school or something). Basically, this is mostly an educational tool, and since I made it, I don't have much I can learn from it, so except improving it, I can't really do anything with it. That's why I want to use this robot to create my first final project idea. It is actually something I can use at home, it is cool, and it is something I can sell. That's why I'll make it in the future (during university or in the summer etc.).
Other people may also find this project and decide to expand on it.
What I learned
I learned a lot while creating this project. First of all, I learned how important checking the parameters of parts I'll use can be; I remember spending hours in finding DC motors, sensors etc. appropriate for my final project. I also remember trying to find a good power source for my final project.
Secondly, I also learned how important separating high voltage/current power source from my ESP32's power source is.
I also properly realized my limits and how much time some stuff takes. I mean, some things I though would take half a day was done in an hour, while some things I thought would take 30 minutes took hours (such as parametric design).
I learned how important (and time consuming) parametric design can be. I quite like it since it can fix things fast and, I mean, it's just way more awesome than randomly designing.
I got adept at producing many things and using many machines.
I learned how hard and important system integration can be.
I learned how to host a site from a XIAO ESP32C6, which is actually something I've always wanted to learn, and now I know how!