Fifteenth assignment
01 May 2019
Week's assignment
This weeks assignment was to design a machine (mechanism + actuation + automation) Build the mechanical parts and operate it manually. Document the group project
My personal contribution
You will find here and overall look to what we did for the mechanical and machine design. My contribution relays on the 3d design, and the arduino code, this last one was really hard, but at the end we could make it work.
Machine
Knee rehabilitation machine
We, as a group, had an approach to the needs the medical community has sometimes. One of our classmates is a traumatologist, so he explained to us that there exist some devices to help patients to recover and rehabilitate the articulations that has gone through a surgical procedure.
Knee flexing motion
After a knee surgery, it is important to follow some physical therapy to recover the proper movement and functionality of the articulation. In this case we focus on an exercise that consists on stretching and flexing the leg.
There are already machines that does this job, unfortunately, they are quite expensive, and not all medical centers, especially in a country like mine, have the possibility to acquire one of these.

Machine design
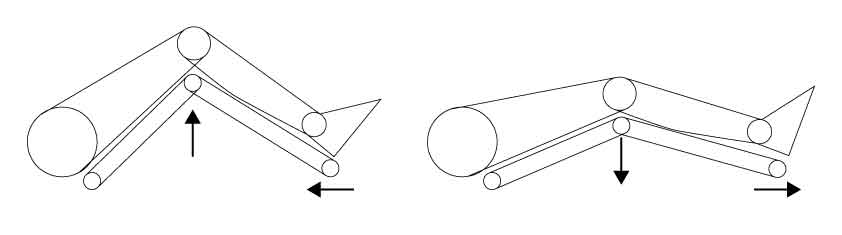
First sketches
At first, we were planning on using strips to generate the x axis movement. But after planning designing a sketching, we came to the conclusion that the fabrication was becoming too complicated, most of the parts would have had to be bought, or to complex to fab.
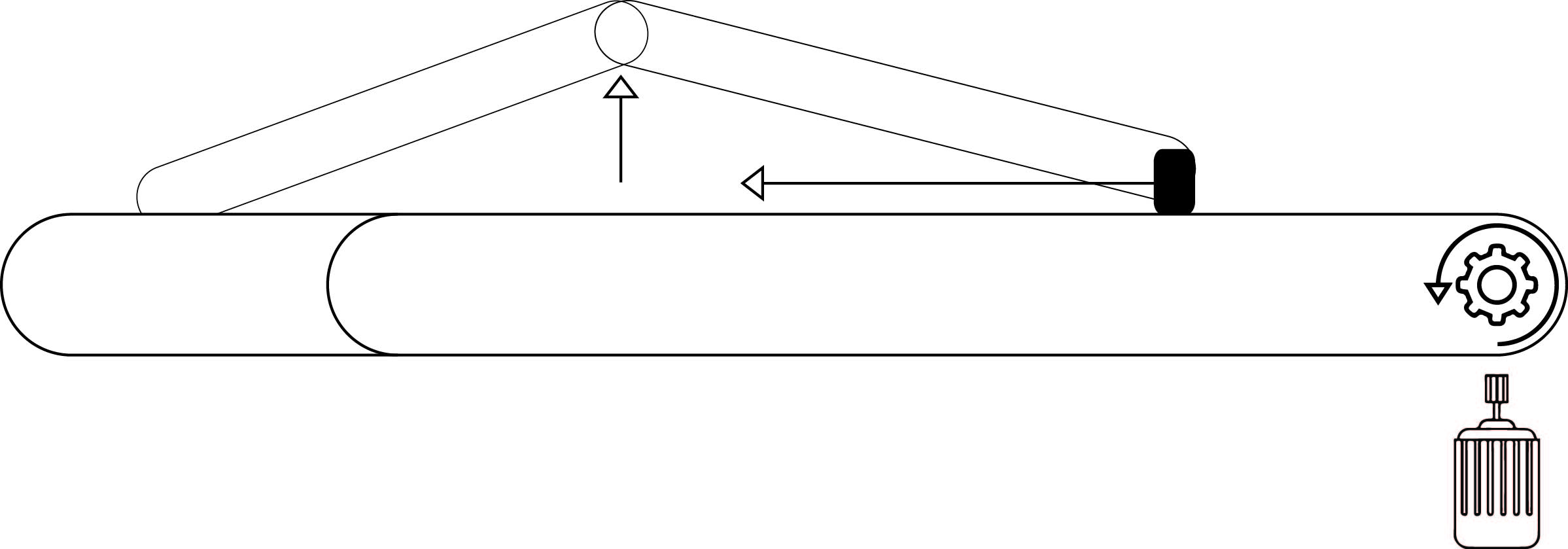
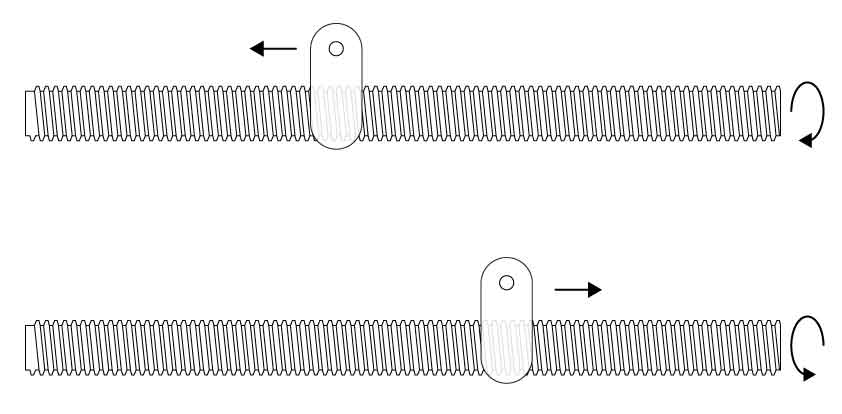
That is why we decided we need to reconsider and redesign and go with a threaded rod.

This object will allow a shift from one side to the other along an immovable axis.
The direction of the movement will depend on the threaded rod.
The redesigning part is the part I worked in the most, besides the programming part that I worked with Renzo Chirinos. I had to make sure we were going to be able to fabricate it, and also verify the the measures and overall size of the machine.
We worked the 3D modeling in Fusion360 and got the cad files of the motors, the threaded rod, and the adapters.
Technical Specifications
Range of Motion: Hyperextension (-10 º) to full Flexion (120 º)
Length: 94 cm
Full leg size: 71 to 104 cm
Tibia: 38 to 58 cm
Femur: 33 to 46 cm
I used anthropometry to check the sizes for our machine.
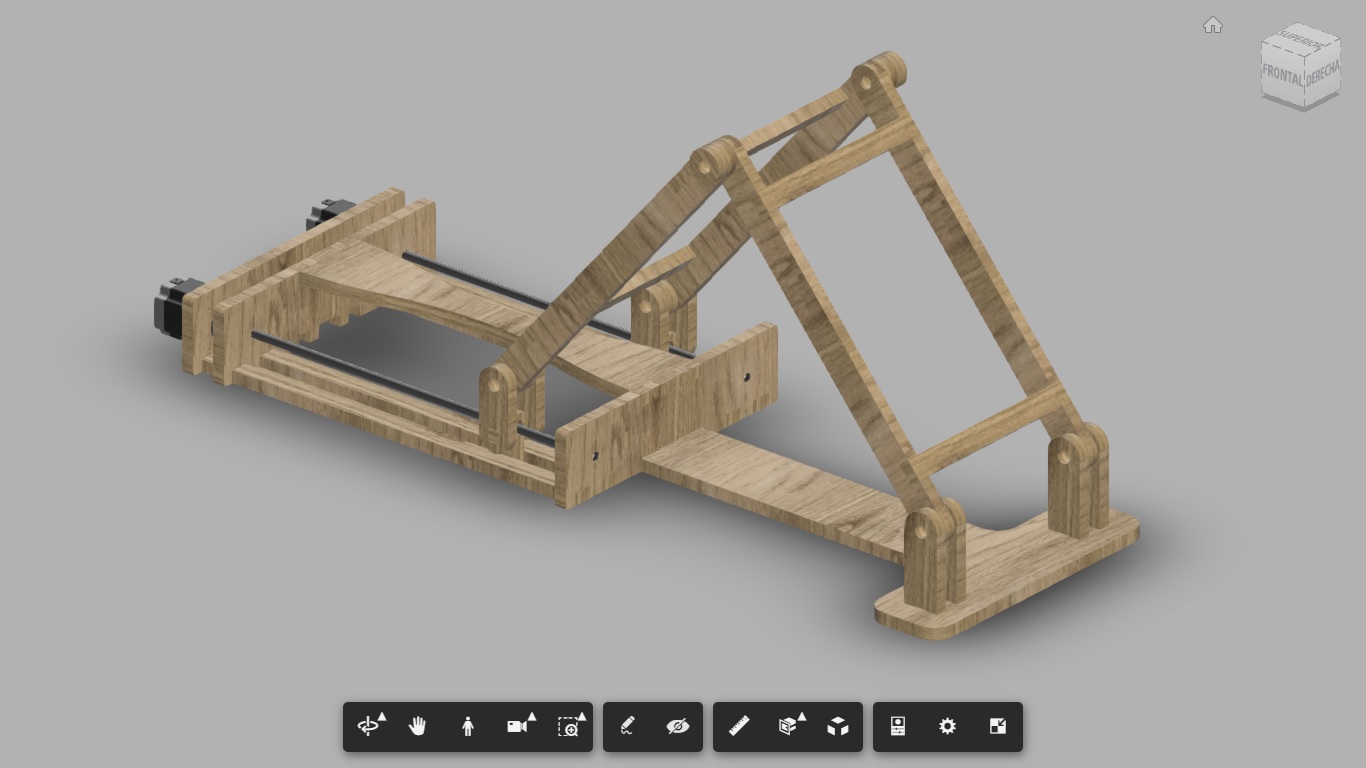
3D design and modeling
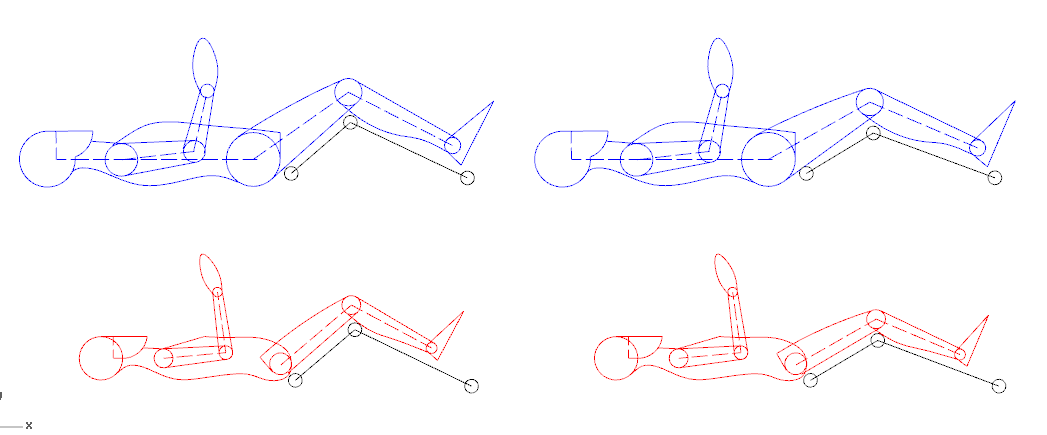
Assembly
Modeling the machine on a 3D software helped us checked the movement, and had an idea of the dimension of the movement that was going to be made.

Programming
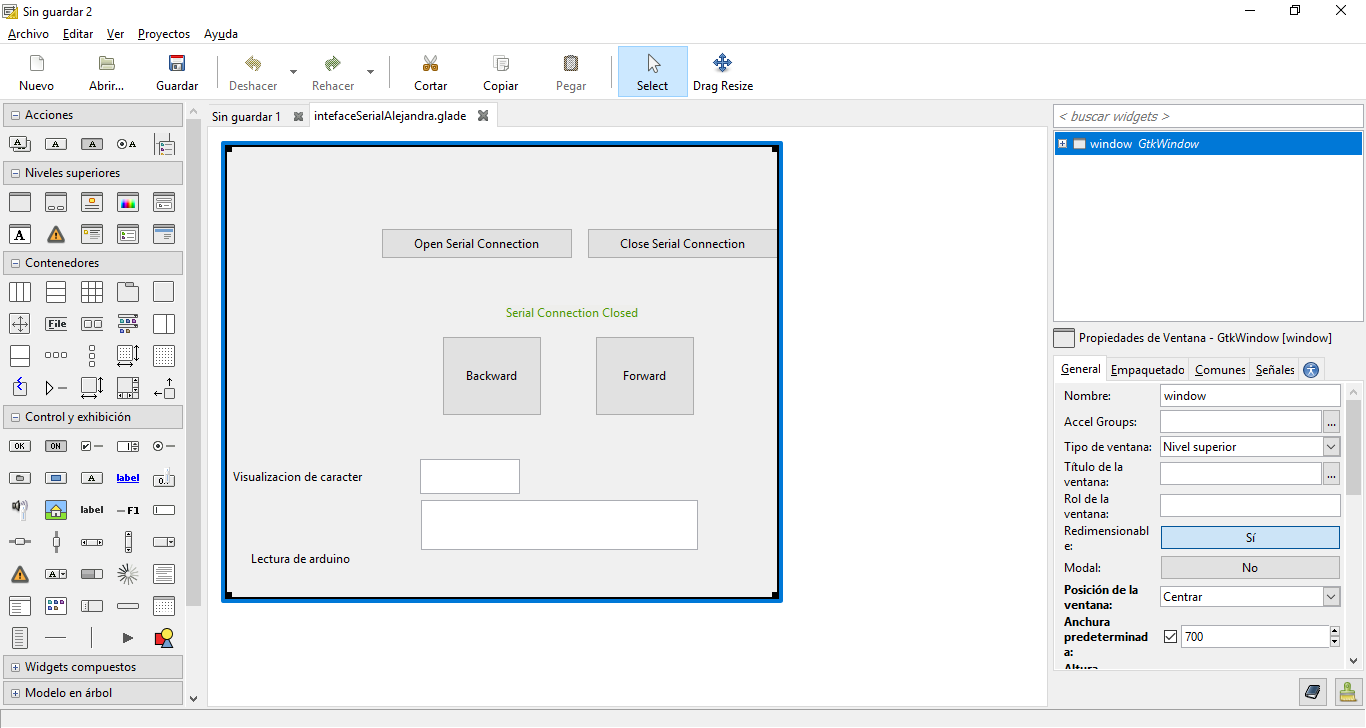
Interface
Renzo worked in the interface and added this part to the code.
Arduino code
Finally this is the arduino code we used.
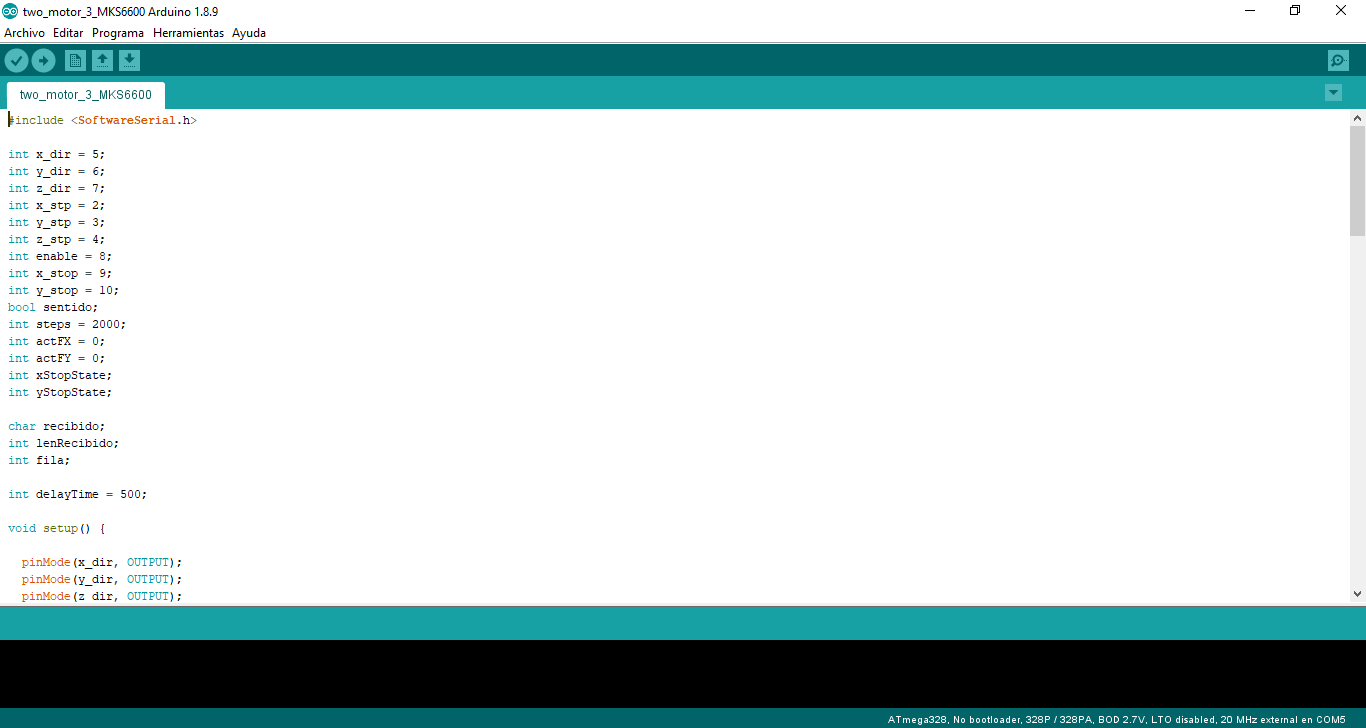
You can copy the code from here or download it with the rest of the files.
MACHINE
Working machine
This is the machine working finally.