Robotic Arm¶
BCCN Robotic Arm

The Team¶
Jose Luis Reategui Rico Kanthatham, Skylabworkshop, Japan
The Challenge¶
- The Robot Arm was assembled...but not functional
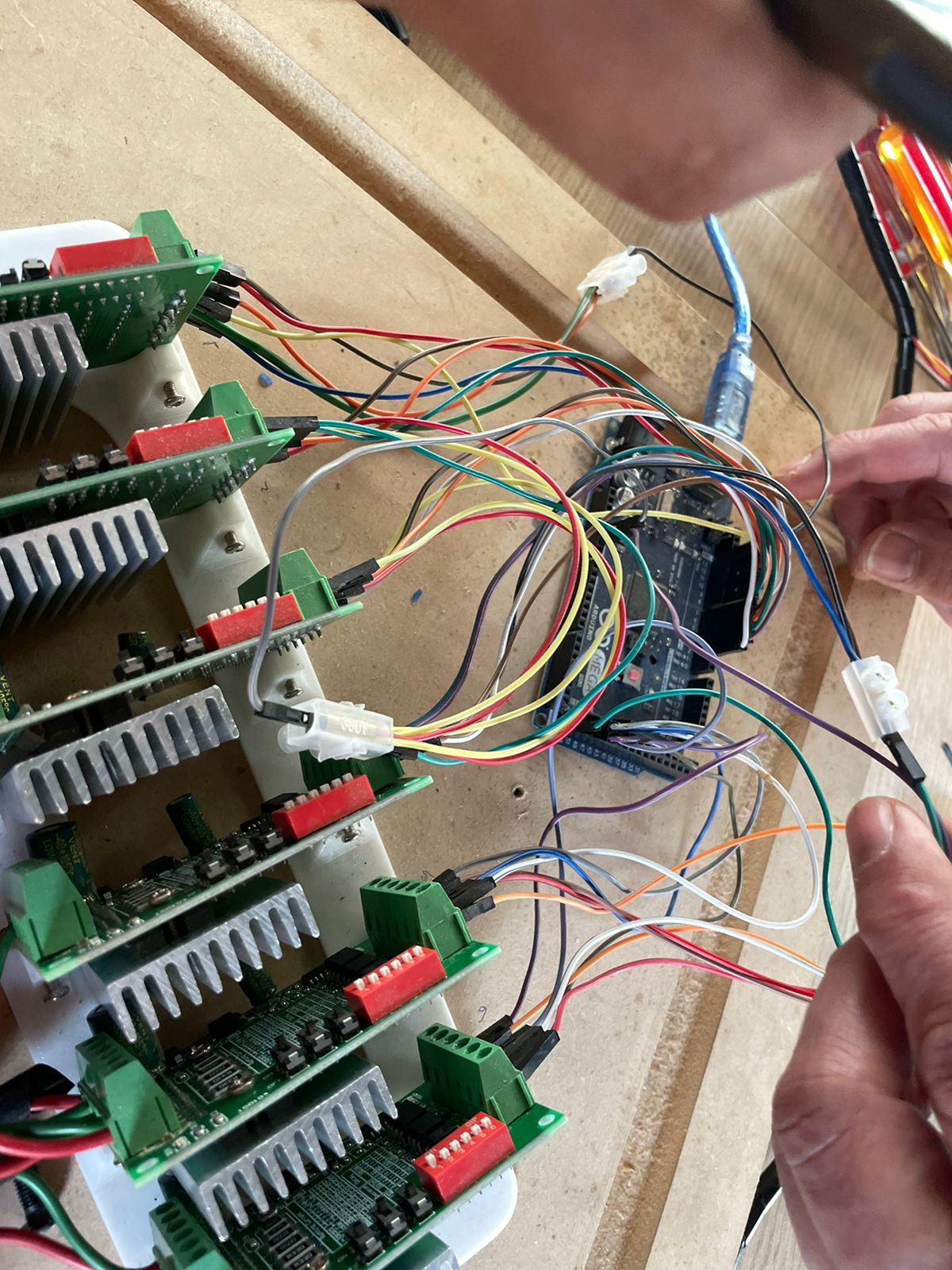
- The system wiring very confusing & unlabeled
- Electrical connections needed improvement to allow for more electrical power and signal stability
The Plan¶
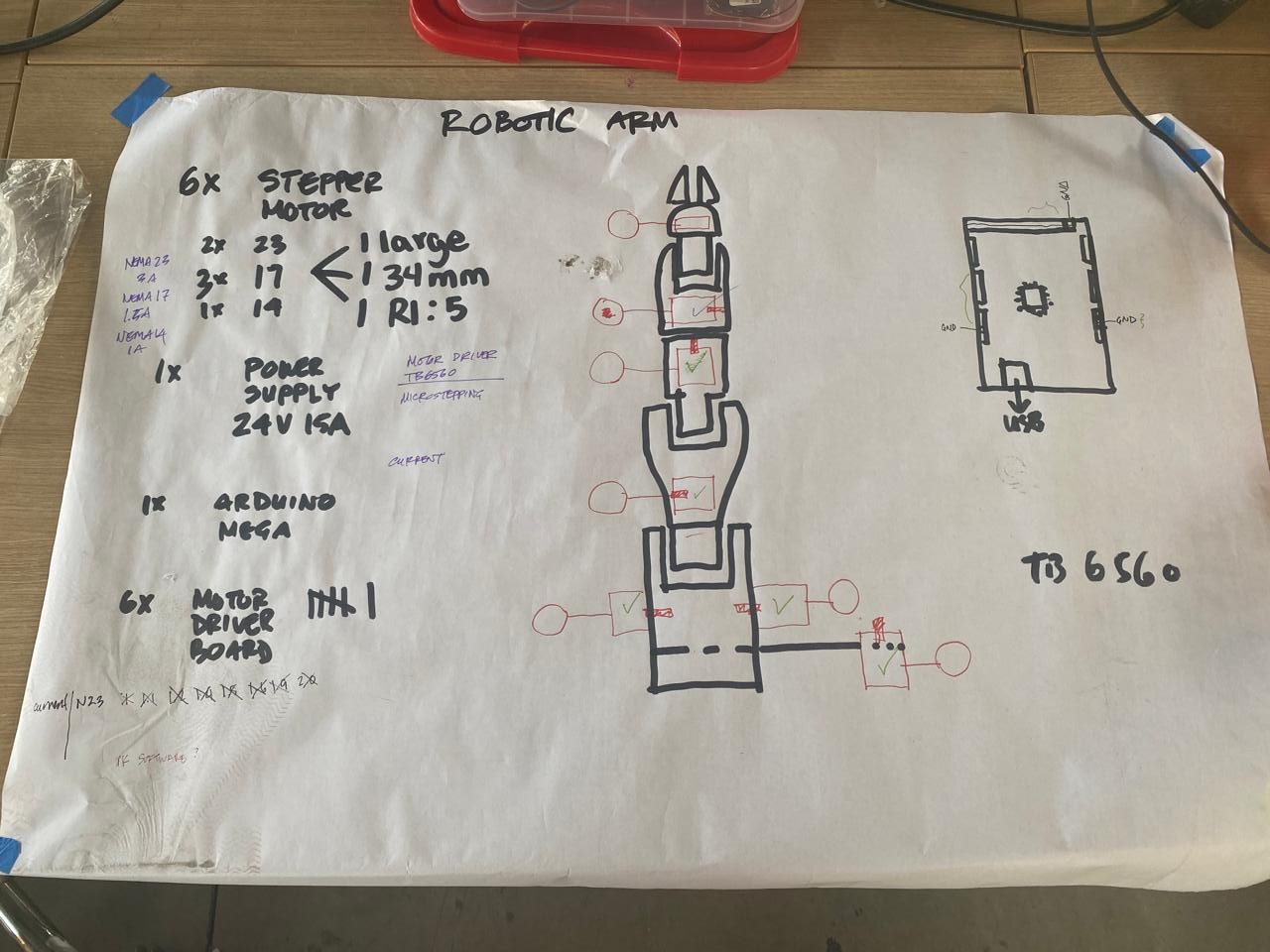
- Full disassembly and rebuild of the Robot Arm
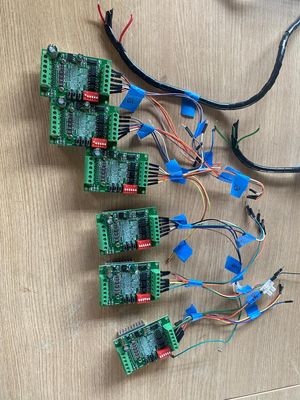
- Systematic testing of all stepper motors and stepper motor drivers
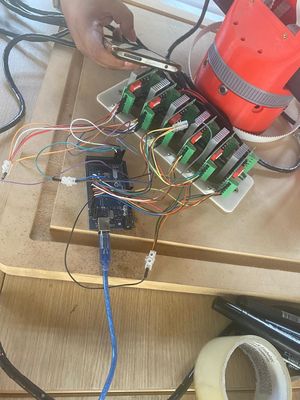
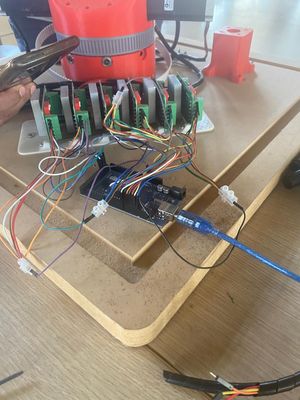
- Improve and organize wiring system > reduce number of wires...label, twist (reduce electromagnetic radiation) and organize them
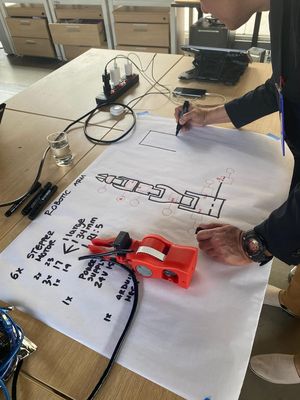
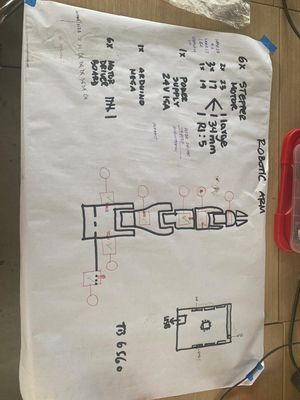
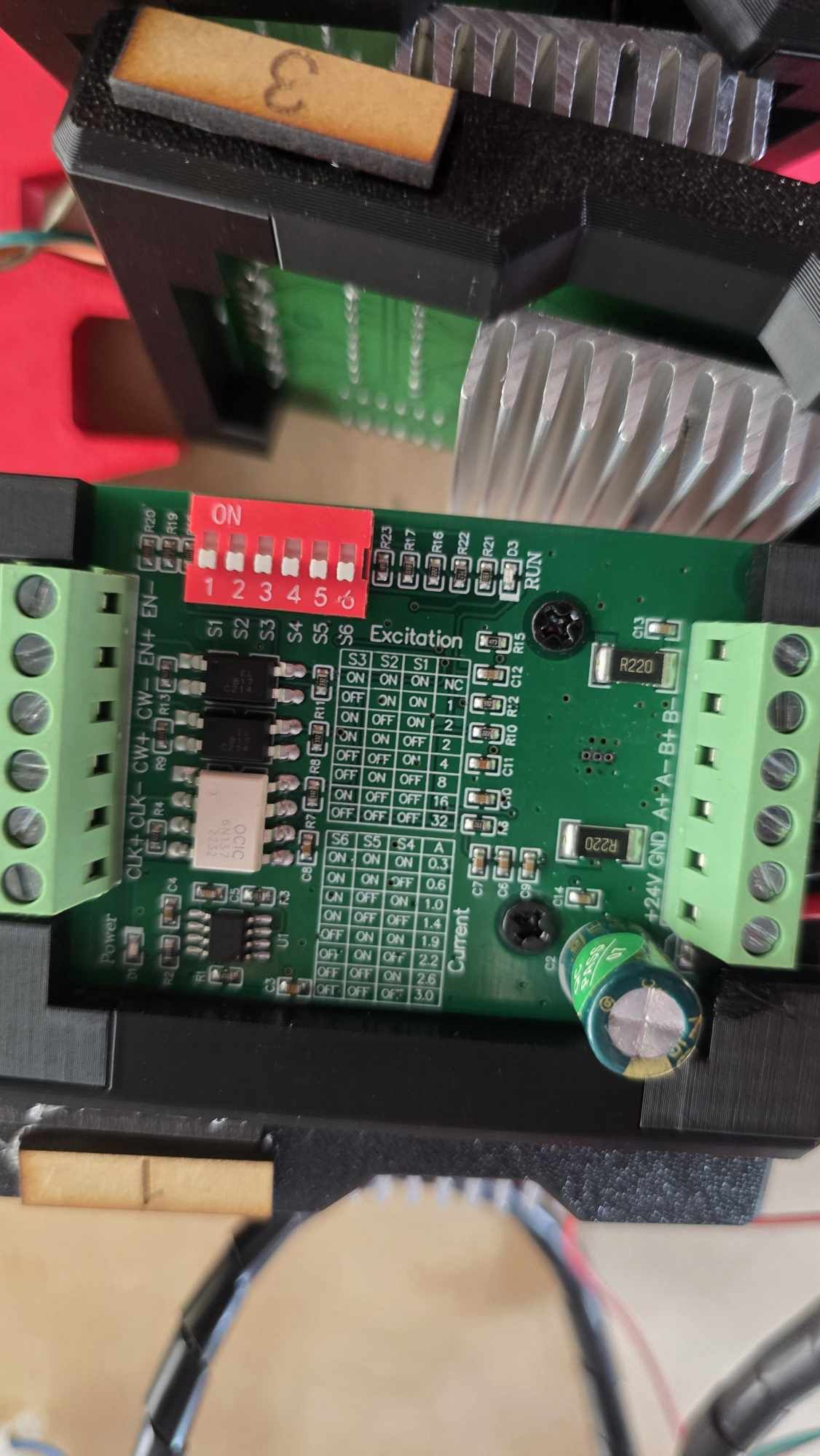
- Understand and apply current and microstepping control on the 2 variants of the TB6560 Stepper Motor Driver and 3 variants of Stepper motors (NEMA14, NEMA17, NEMA23)
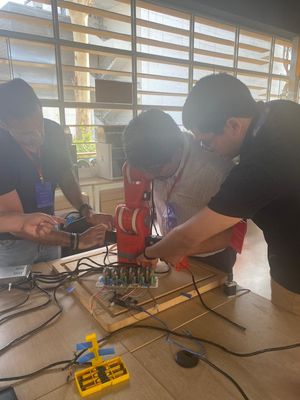
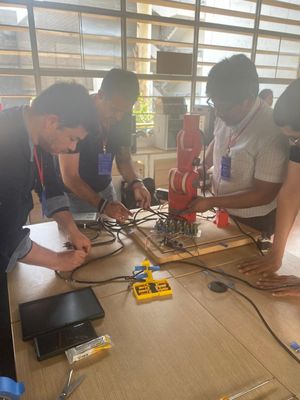
The Work¶
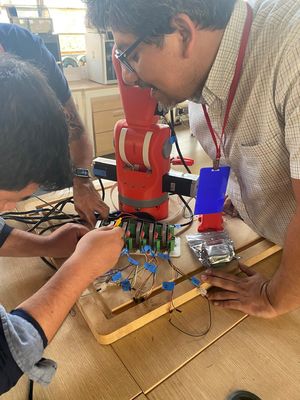
The rebuild took place over 4 sessions. Disassembly of the Robot Arm and testing of the components revealed...
- Some non-functional motor driver boards discovered when powered and tested with a multi-meter...replacements were fortunately available
- Incorrect current and microstepping settings for some motors...stepper motor specific datasheets needed to be downloaded
- Each stepper motor was individually tested and discovered to be functional...number label were assigned to each
- Challenging installation of timing belts onto 3D printed stepper motor spindle attachment...no solution found
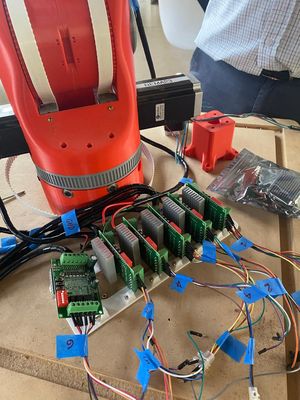
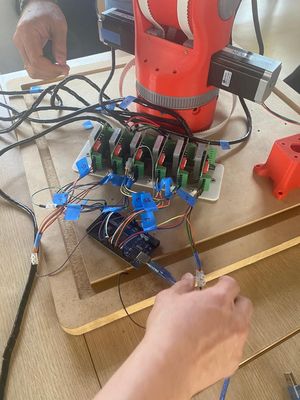
- Existing stepper motor driver frame is poorly designed and makes board installation and wire attachment difficult...we found and printed a new and improved board frame
- Existing wiring connections were just raw wire strands...we improved wire ends for connections with solder and paddle connectors
- Many individual GND wires from motor drivers were replaced...by serially connecting GND wires from one motor driver to the next
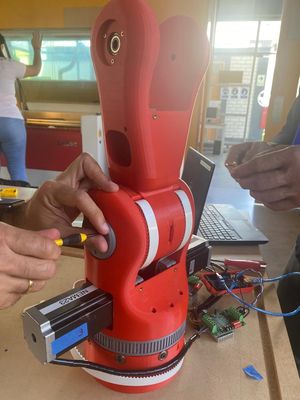
The Results¶
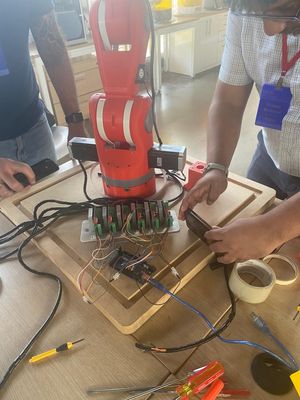
- Robot arm assembled...much neater and more organized...and functional!
- The current control software is rudimentary however...not able to control robot arm motion to be fluid and elegant
Next Steps..¶
- Integrate with linux based ROS control system
- Add PID code to smooth arm motion?
Images¶