Tower Pro
Micro Servo
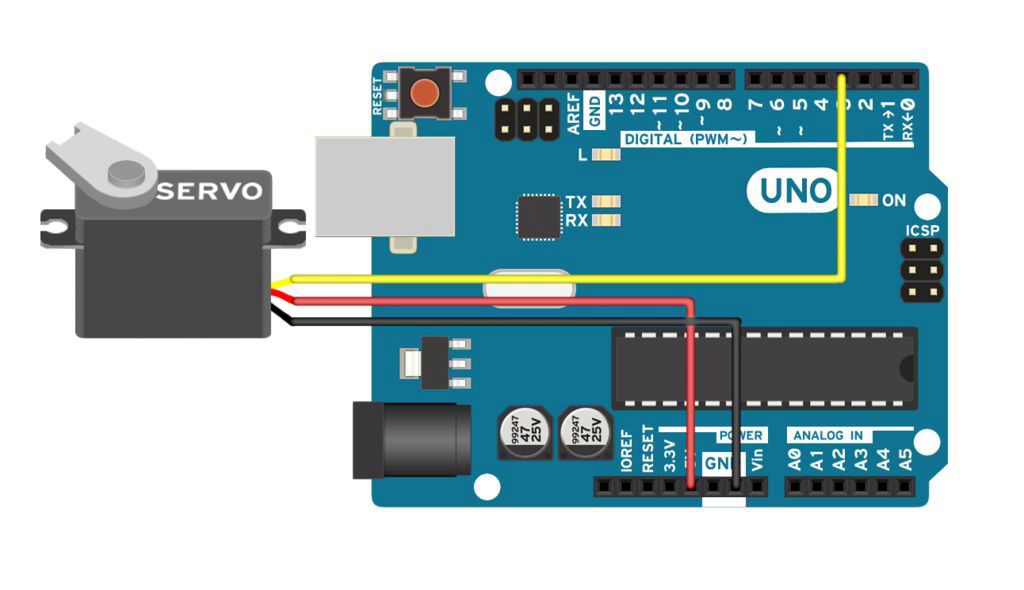
Tower Pro SG90 is an ideal servo motor for little mechanism. This one is comonly seen in RC vehicles and I saw it also works with PWM signal.
I have used it before, in a robotic arm project with 5 servos like this with acrylic body. To use the servo in arduino, you have to load the servo.h library at the begining of the code.
Technical Details:
Size: 23.1 mm x 12.2 mm x 29 mm
Working Voltage: 4.8-6v
Weight: 9 g
Speed at 4.8 V: 0.06 - 0.12 sec/60°
Compulsion Torque: 1.3 kg/cm
Torque: 0.06 - 0.12 sec/60°
Cable Lenght: 15 cm