17. Applications and Implications¶
Propose a final project masterpiece that integrates the range of units covered.
Your project should incorporate:
- 2D and 3D design
- additive and subtractive fabrication processes
- electronics design and production
- microcontroller interfacing and programming
- system integration and packaging
Where possible, you should make rather than buy the parts of your project. Projects can be separate or joint, but need to show individual mastery of the skills, and be independently operable.
See Final Project Requirements for a complete list of requirements you must fulfil.
The answers to the questions below will allow you to create your BOM (Bill Of Materials).
What will it do?¶
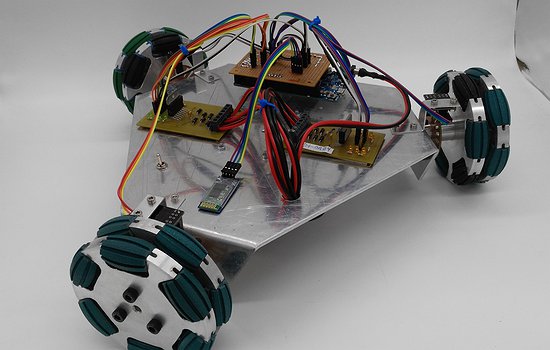
My final project is an Omni-directional three-wheeled robot controlled by radio transceivers.
The rover moves with three axes of freedom:
- X _ Forward and Back ward.
- Y _ Sideway.
- Rotation _ Clockwise and CounterClockWise.
The movements are controlled by a remote control using nRF24 modules for the communication, and Joysticks as inputs that indicate direction and speed.
It will have a distance sensor for collision avoidance.
Who has done what beforehand?¶
I have found a few similar projects in the Archive of FabAcademy, but all the ones I found were four-wheelers, and mine one is a three-wheeler (which doesn’t seem to be super relevant, but it’s different when it comes to the mechanical and coding part).
I found a three-wheeled “Robot Omnidirecional” documented in the FabLab U. de Chile page, that although it is not a FabAcademy project, it’s anyway open source and made with the basic tools in a FabLab:
I leave the auto-translated description of the project (originally in Spanish):
The robot is capable of moving with three independent degrees of freedom, one corresponding to the forward-backward movement, another to the left-right movement and another corresponding to the rotations. The motor control is done using an Arduino board that receives remote instructions from the application developed for Android.
The project was developed for the Robotics and Mechatronics Project Workshop."
I will be making me own boards, make a physical remote instead of an app and use a distance sensor for collision avoidance (in addition to other things, like the materials for the frame, design, and so on).
What will you design?¶
By the moment I have designed the omniWheels and the remote control. I have also designed a simple frame for the robot itself during the Computed aided design assignment, but it will be redesigned later.
What materials and components will be used?¶
Robot:
- Frame: 3mm acrylic.
- Microcontroller on board: ATtiny3216.
- Motors: JGA25-370.
- Motor drivers: TB6612FNG.
- Distance sensor: GP2Y0A21YK infrared distance sensor.
- Communication: nRF24.
- Power: 3S lipo battery (~11.1V).
- Wheels: PLA + TPU, and 3mm rods.
Remote control:
- Frame: 3mm acrylic.
- Microcontroller on board: ATtiny1614.
- Communication: nRF24.
- Grove - Thumb joysticks.
- Power: UR18650 single cell lipo battery.
Where will they come from?¶
I have bought some components on Amazon and Digikey, and others I have obtained from the FabLab (whose main seller is Digikey).
Commercial components:
- nRF24 modules.
- Thumb joysticks.
- Batteries.
- Distance sensor.
- Motor drivers.
Fabricated parts:
- OmniWheels.
- Boards for Robot and Remote control.
- Frames for Robot and Remote control.
How much will they cost?¶
The plan is to make the project cost less than $100 but since it’s a development project and it needed some 3D print tests and so on, the cost has risen to $110 so far.
What parts and systems will be made?¶
The frames, wheels and most of the electronics.
What processes will be used?¶
- Computer aided design, 2D and 3D: Wheels and frames.
- Laser cutting: Frames.
- 3D printing: Wheels.
- Electronics design: Boards for remote control and Robot.
- Input devices: Joysticks and distance sensor.
- Output devices: Motors.
- Embedded Communication: nRF24 transceivers.
What questions need to be answered?¶
- Is the acrylic a good material for the robot?
- Will the design+materials of the wheels be good enough to work indoor and outdoor?
- Will the torque of que motors (1.4Kg*cm each) be enough to work on no-flat surfaces (which are inevitable in outdoor environments)?
- Since I plan controlling the robot using ROS after the FabAcademy… Is my project going to be completely and easily adaptable for that purpose? Will I need to change/add something else?
How will it be evaluated?¶
- It should be able to move with 3 degrees of freedom.
- It must be controlled by its remote control.
- Collision avoidance with distance sensors is rather something for the future plans about controlling it with ROS, it is not a fundamental aspect of my idea as a FabAcademy final project.