- OmniWheel¶
These omniwheels are made by 3D printing and use round steel rods as shafts for the rollers.
They are a good and customized alternative for commercial omniwheels.
3D design¶
I have designed it parametrically in Fusion 360.
The OmniWheels are designed in three parts: (1) a main wheel, (2) small rollers that are what give it the ability to move on another axis, and (3) the motor hub so if a motor change is necessary, it can be done without printing the main wheel again:
I actually have three versions of my omniwheels:
- The first version is intended to be printed 100% in PLA.
This model can be found in Files as “Omniwheel only PLA”.
- The second version has a modification in the rollers. Now we have a two-parts roller: (1) An internal roller intended to be made in PLA, and (2) a TPU sleeve, which increases the Roller-Floor friction.
This model can be found in Files as “Omniwheel PLA + TPU”.
- The third version (the one I used) has the same principle as the second one, but in this case the TPU sleeve has a pattern, intended to increase friction even more; It also has a self-locking relief.
The link to this model (it resulted to heavy to be uploaded) can be found in Files as “Omniwheel official”.
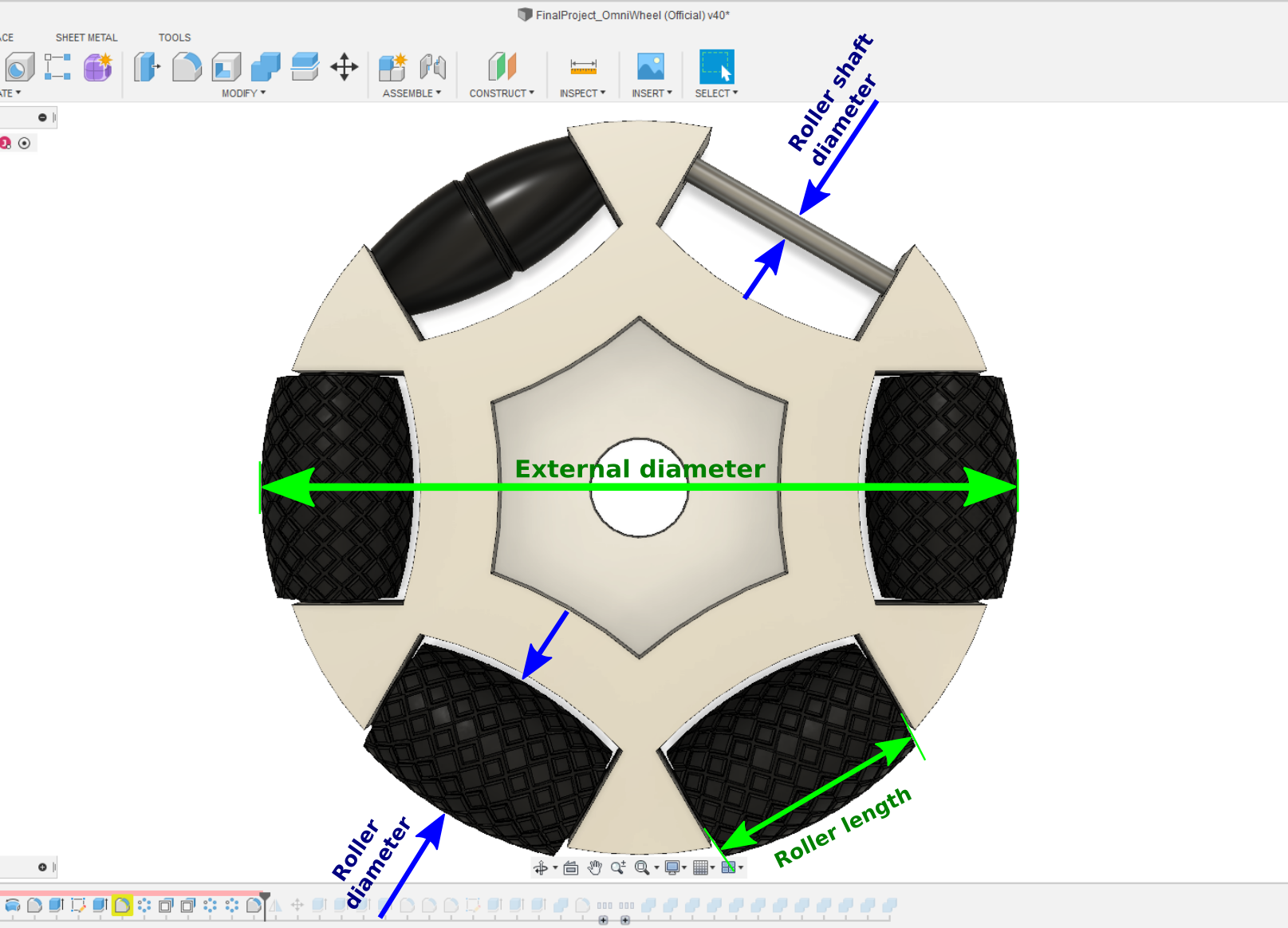
Parameters:
Parameters table:
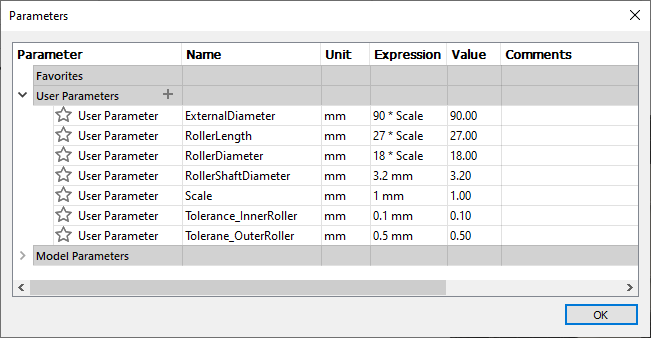
Main wheel parameters:
- By changing Scale we can proportionally change the main measurements of the model.
- The tolerance inner roller is a parameter to prepare the piece for 3D printing, it creates a very small gap between the inner roller and its main wheel support, then it can free rotate freely.
- The tolerance outer roller is a parameter to prepare the piece for 3D printing, it creates a small gap between the outer roller and its main wheel support, this value is higher than that for the inner roller to avoid any contact friction.
3D print¶
I have sliced the models in the Ultimaker Cura 4.9.0
For all of the printings I have used Adhesive spray for 3D printer.
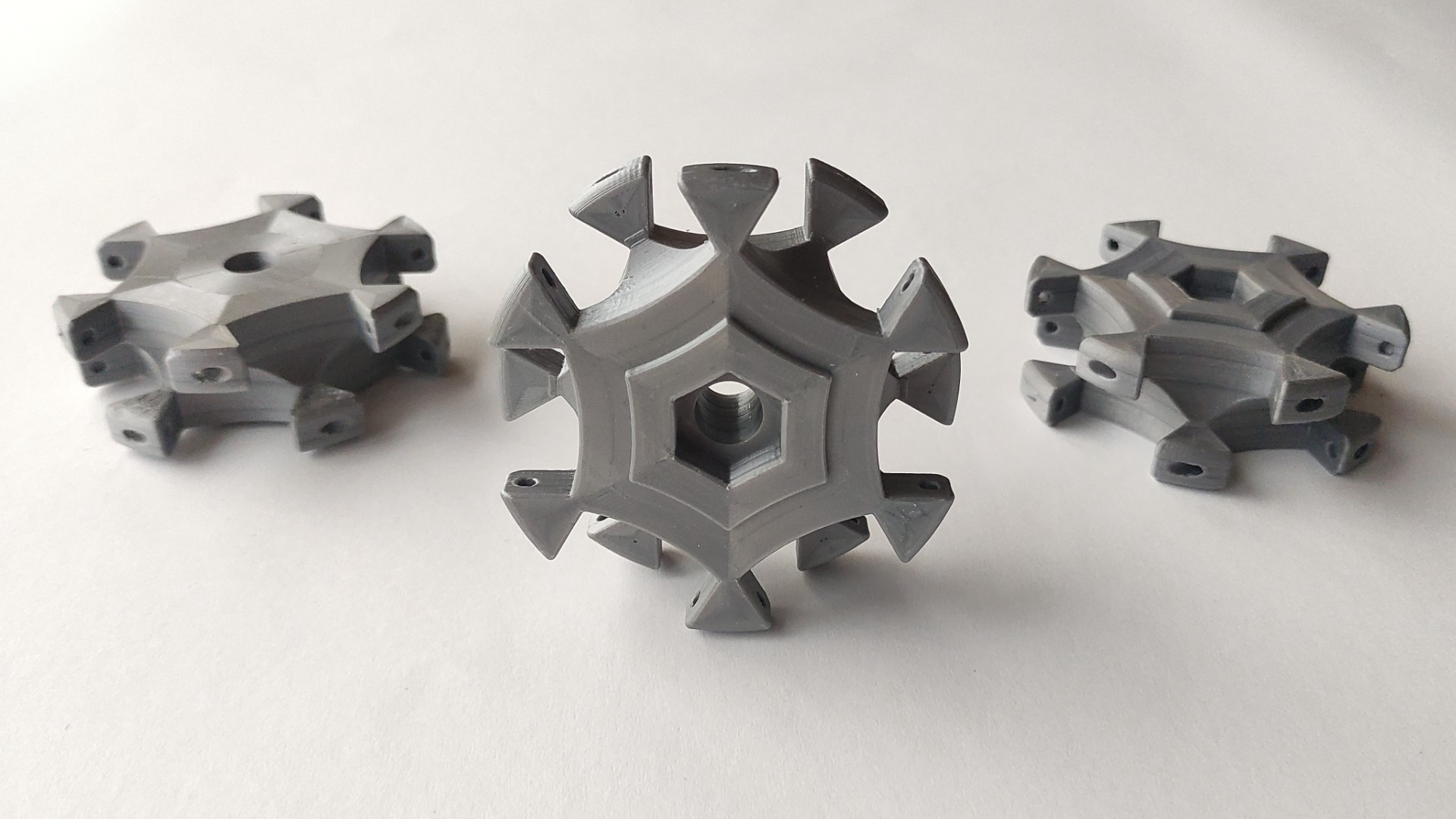
Main wheel¶
Video of the printing time-lapse:
Printed main wheels:
Print summary:
- 3D printer = Felix Tec 4.
- Filament = 1.75mm generic Silk silver PLA.
- Nozzle = 0.35mm
- Layer height = 0.15mm
- Wall = 1.5mm
- Infill = 20%, Lines.
- Support = Enabled, type tree.
- Build plate adhesion = None.
- Ironing = Enabled, 0% flow, linear movement.
- Real printing time = ~6h each (3 pieces).
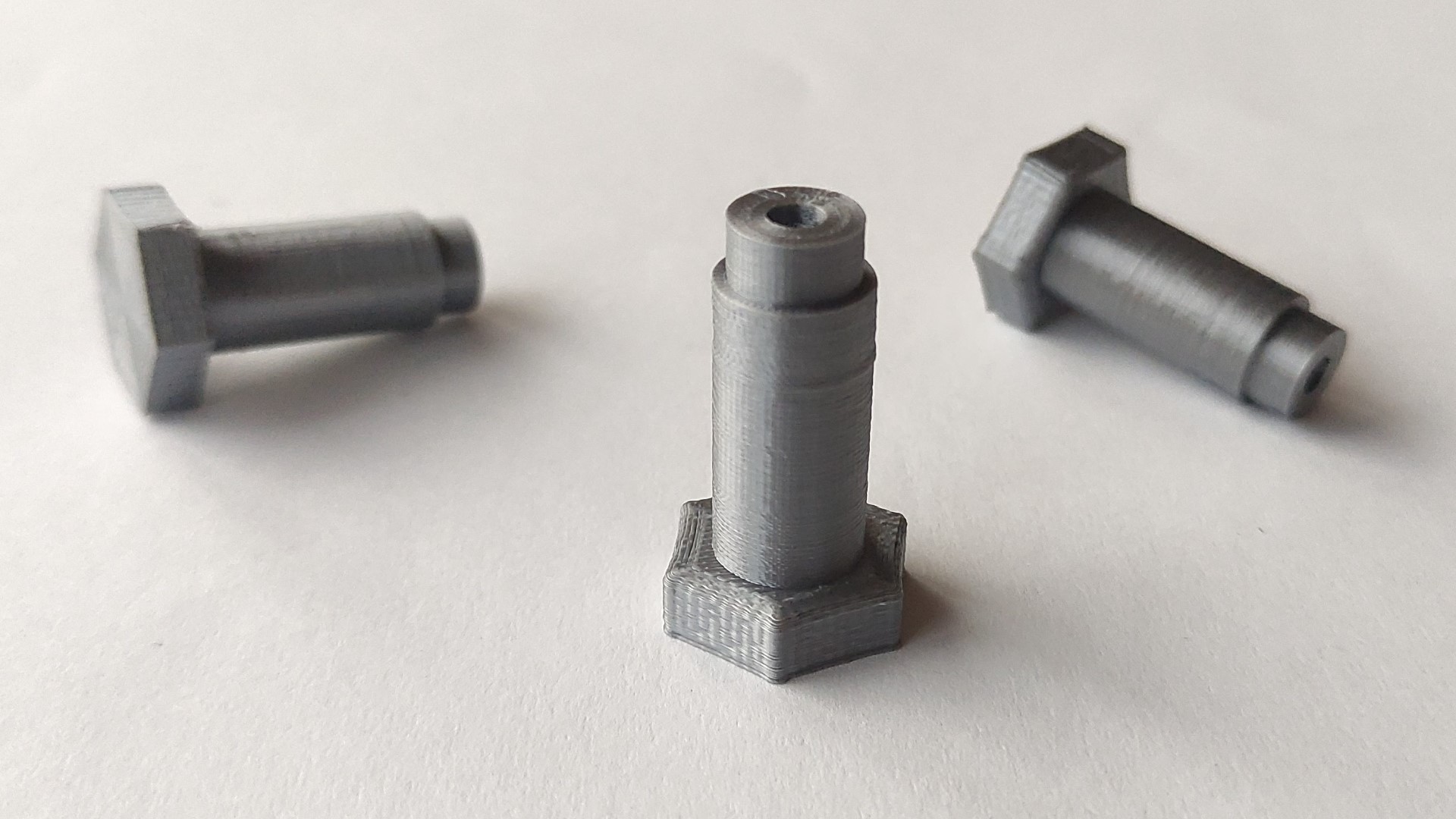
Motor hub¶
Printed motor hub:
Print summary:
- 3D printer used = Panowin F1.
- Filament = 1.75mm generic Silk silver PLA.
- Nozzle = 0.4mm
- Layer height = 0.15mm
- Wall = 1.5mm
- Infill = 20% lines.
- Support = Disabled.
- Build plate adhesion = Brim.
- Ironing = Enabled, 0% flow.
- Real printing time = ~7h.
Roller¶
Inner roller¶
Printed inner rollers:

Print summary:
- 3D printer = Ultimaker S5.
- Filament = 2.85 generic black PLA.
- Nozzle = AA0.4
- Layer height = 0.2mm
- Wall = 1.2mm
- Infill = 20%, Gyroid.
- Support = Disabled.
- Build plate adhesion = Brim.
- Ironing = Disabled.
- Real printing time = ~5h30m in total (36 pieces).
Outer roller¶
Printed outer rollers:
Print summary:
- 3D printer = Panowin F1.
- Filament = 1.75mm generic black TPU.
- Nozzle = 0.4mm
- Layer height = 0.2mm
- Wall = mm
- Infill = 75%, Concentric.
- Support = Disabled.
- Build plate adhesion = Disabled.
- Ironing = Disabled.
- Real printing time = ~21h in total (36 pieces).
yeah! it resulted being a very slow printer 😅 twice the time indicated by Cura, but the result was worth it.
Assembly¶
- I started cutting the round steel rods at ~35mm length:
- I inserted the inner roller into the outer roller:
- I put the rollers in the main wheel using the shafts and, eventually, put the motor hub:
Files¶
- Omniwheel only PLA _ Fusion 360 model link.
- Omniwheel PLA + TPU _ Fusion 360 model link.
- Omniwheel official _ Fusion 360 model link.