Useless machine 2.0
<<<<<<< HEAD When testing the printed axis on the last day we had to make it do something. Since we had the useless box it made sense to make the rail push the toggle switch from the useless box.
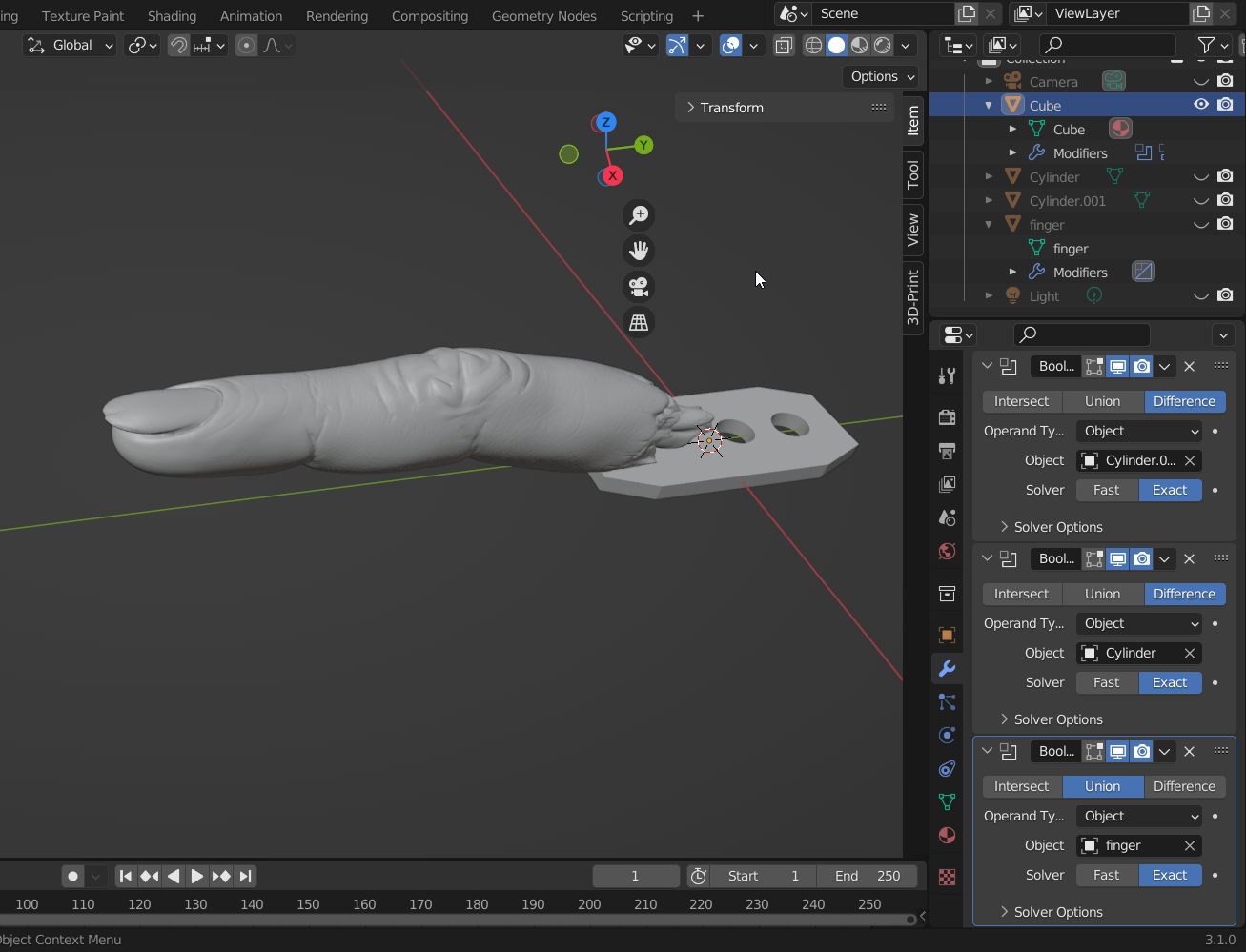
The project is based on the Printed linear axis, rp2040 H-bridge. Finger model is from thingiverce. Using blender3D a mount plate was added and printed in Ultimaker 2+. modular-things was used to control the machine see code below.
Waag received a useless machine for the 15.5th anniversary from Neil and MIT. While we were fine-tuning Babken's fully printable axis with a modular-things board, the following happened, which in turn led to the 2.0 version of the useless machine.
9da1a5ee89ea0d8c87c1564e6b9bc51a208c27df
Java script code writen by Leo to control the finger.
async function main() {
await stepperBabken.setCurrentScale(.8)
await stepperBabken.setStepsPerUnit(200)
for (let i = 0; i < 20; i++) {
// await stepperBabken.setVelocity(Math.random()*300)
await stepperBabken.relative(1+i/100);
await stepperBabken.relative(-(1+i/100));
await delay(1000)
}
}
function delay(time) {
return new Promise(resolve => setTimeout(resolve, time));
}
main()
To add touth sencitivity a coper tape was added to the finger to affect the capatacitance